A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 5
Issue 3
Volume 5
Issue 3
IEEE/CAA Journal of Automatica Sinica
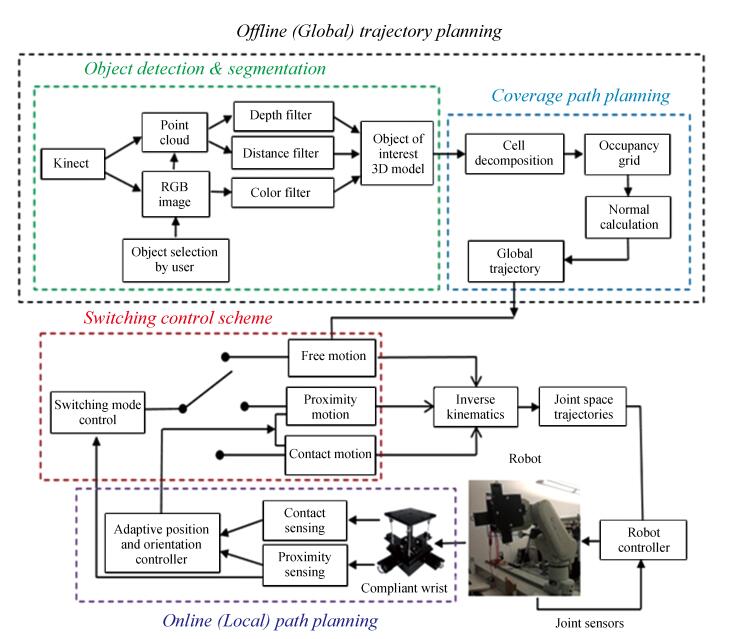
| Citation: | Danial Nakhaeinia, Pierre Payeur and Robert Laganière, "A Mode-Switching Motion Control System for Reactive Interaction and Surface Following Using Industrial Robots," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 670-682, Mar. 2018. doi: 10.1109/JAS.2018.7511069

|

| [1] |
Y. H. Yin, H. Hu, and Y. C. Xia, "Active tracking of unknown surface using force sensing and control technique for robot, " Sens. Actuators A Phys., vol. 112, no. 2-3, pp. 313-319, May 2004.
|
| [2] |
E. C. Li and Z. M. Li, "Surface tracking with robot force control in unknown environment, " Adv. Mater. Res. , vol. 328-330, pp. 2140-2143, Sep. 2011.
|
| [3] |
Y. Kang, Z. J. Li, X. Q. Cao, and D. H. Zhai, "Robust control of motion/force for robotic manipulators with random time delays, " IEEE Trans. Control Syst. Technol. , vol. 21, no. 5, pp. 1708-1718, Sep. 2013. http://ieeexplore.ieee.org/document/6355966/
|
| [4] |
R. Ibrayev and Y. B. Jia, "Recognition of curved surfaces from "One-Dimensional" Tactile Data, " IEEE Trans. Autom. Sci. Eng. , vol. 9, no. 3, pp. 613-621, Jul. 2012.
|
| [5] |
P. Payeur, C. Pasca, A. M. Cretu, and E. M. Petriu, "Intelligent haptic sensor system for robotic manipulation, " IEEE Trans. Instrum. Meas. , vol. 54, no. 4, pp. 1583-1592, Aug. 2004. http://ieeexplore.ieee.org/document/1351045/
|
| [6] |
D. Nakhaeinia, P. Payeur, A. Chávez-Aragón, A. M. Cretu, R. Laganière, and R. Macknojia, "Surface following with an RGB-D vision-guided robotic system for automated and rapid vehicle inspection, " Int. J. Smart Sens. Intell. Syst. , vol. 9 no. 2, pp. 419-447, Jun. 2016.
|
| [7] |
S. Hutchinson, G. D. Hager, and P. I. Corke, "A tutorial on visual servo control, " IEEE Trans. Rob. Autom. , vol. 12, no. 5, pp. 651-670, Oct. 1996.
|
| [8] |
D. Xiao, B. K. Ghosh, N. Xi, and T. J. Tarn, "Sensor-based hybrid position/force control of a robot manipulator in an uncalibrated environment, " IEEE Trans. Control Syst. Technol. , vol. 8, no. 4, pp. 635-645, Jul. 2000.
|
| [9] |
C. C. Cheah, S. P. Hou, Y. Zhao, and J. J. E. Slotine, "Adaptive vision and force tracking control for robots with constraint uncertainty, " IEEE/ASME Trans. Mechatron., vol. 15, no. 3, pp. 389-399, Jun. 2010. https://ieeexplore.ieee.org/document/5204256/?reload=true&arnumber=5204256&filter%3DAND(p_IS_Number:5441215)
|
| [10] |
I. Siradjuddin, L. Behera, T. M. McGinnity, and S. Coleman, "A position based visual tracking system for a 7 DOF robot manipulator using a Kinect camera, " in Proc. 2012 Int. Joint Conf. Neural Networks, Brisbane, QLD, Australia, pp. 1-7.
|
| [11] |
G. J. García, P. Gil1, D. Llácer, and F. Torres, "Guidance of robot arms using depth data from RGB-D camera, " in Proc. 10th Int. Conf. Informatics in Control, Automation and Robotics, Reykjavík, Iceland, 2013, pp. 1-7.
|
| [12] |
D. Nakhaeinia, R. Fareh, P. Payeur, and R. Laganière, "Trajectory planning for surface following with a manipulator under RGB-D visual guidance, " in Proc. IEEE Int. Symp. Safety, Security, and Rescue Robotics, Linkoping, Sweden, 2013, pp. 1-6. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.709.7523
|
| [13] |
Z. J. Li, S. T. Xiao, S. S. Ge, and H. Su, "Constrained multilegged robot system modeling and fuzzy control with uncertain kinematics and dynamics incorporating foot force optimization, " IEEE Trans. Syst. Man Cybern. Syst. , vol. 46, no. 1, pp. 1-15, Jan. 2016. https://ieeexplore.ieee.org/document/7101859/
|
| [14] |
Z. J. Li, Z. T. Chen, J. Fu, and C. Y. Sun, "Direct adaptive controller for uncertain MIMO dynamic systems with time-varying delay and dead-zone inputs, " Automatica, vol. 63, no. 287-291, Jan. 2016.
|
| [15] |
Y. M. Li, S. C. Tong, L. Liu, and G. Feng, "Adaptive output-feedback control design with prescribed performance for switched nonlinear systems, " Automatica, vol. 80, no. 225-231, Jun. 2017.
|
| [16] |
R. Macknojia, A. Chávez-Aragón, P. Payeur, and R. Laganière, "Experimental characterization of two generations of Kinect's depth sensors, " in Proc. 2012 IEEE Int. Symp. Robotic and Sensors Environments, Magdeburg, Germany, pp. 150-155. https://ieeexplore.ieee.org/document/6402634/
|
| [17] |
R. Macknojia, A. Chávez-Aragón, P. Payeur, and R. Laganière, "Calibration of a network of Kinect sensors for robotic inspection over a large workspace, " in Proc. 2013 IEEE Workshop on Robot Vision, Clearwater Beach, FL, USA, pp. 184-190. https://ieeexplore.ieee.org/document/6521936/
|
| [18] |
H. Ghazouani, M. Tagina, and R. Zapata, "Robot navigation map building using stereo vision based 3D occupancy grid, " J. Artif. Intell. Theory Appl. , vol. 1, no. 3, pp. 63-72, Nov. 2011. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.397.7077
|
| [19] |
E. U. Acar, H. Choset, A. A. Rizzi, P. N, Atkar, and D. Hull, "Morse decompositions for coverage tasks, " Int. J. Rob. Res. , vol. 21, no. 4, pp. 331-344, Apr. 2002.
|
| [20] |
D. Nakhaeinia, P. Payeur, and R. Laganière, "Adaptive robotic contour following from low accuracy RGB-D surface profiling and visual servoing, " in Proc. Canadian Conf. Computer and Robot Vision, Montreal, QC, Canada, 2014, pp. 48-55. https://ieeexplore.ieee.org/document/6816823/
|
| [21] |
P. Laferrière, "Instrumented compliant wrist system for enhanced robotic interaction, " M. S. thesis, University of Ottawa, Ottawa, Canada, 2016.
|
| [22] |
A. A. Moughlbay, E. Cervera, and P. Martinet, "Error regulation strategies for model based visual servoing tasks: application to autonomous object grasping with Nao robot, " in Proc. 12th Int. Conf. Control Automation Robotics & Vision, Guangzhou, China, 2012, pp. 1311-1316.
|
| [23] |
T. Kröger and F. M. Wahl, "Stabilizing hybrid switched motion control systems with an on-line trajectory generator, " in Proc. 2010 IEEE Int. Conf. Robotics and Automation, Anchorage, AK, USA, pp. 4009-4015. https://ieeexplore.ieee.org/document/5509428/?arnumber=5509428
|
Figures(16) / Tables(5)






 DownLoad:
DownLoad: