A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 2
Volume 9
Issue 2
IEEE/CAA Journal of Automatica Sinica
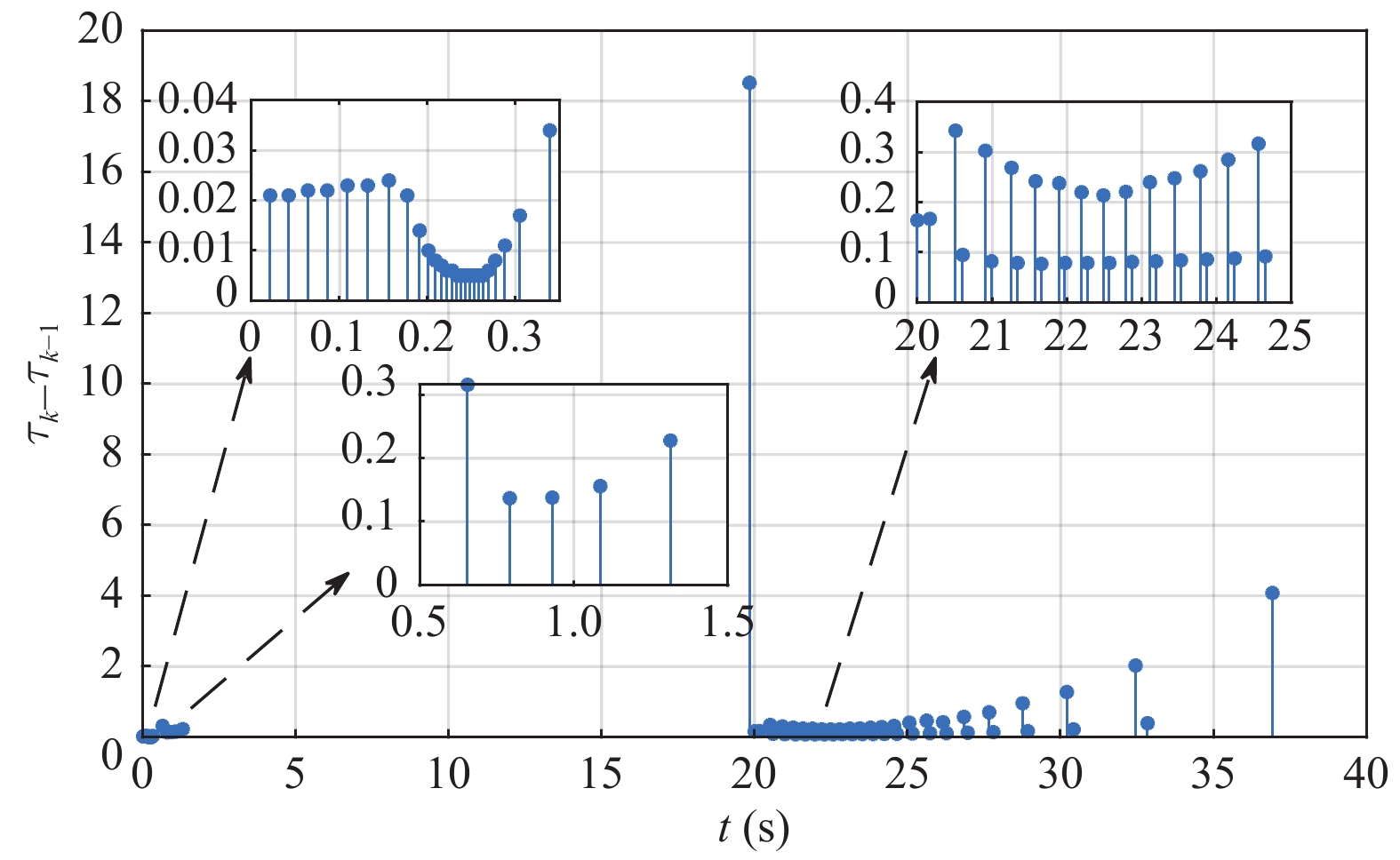
| Citation: | D. Zhao and M. M. Polycarpou, “Fault accommodation for a class of nonlinear uncertain systems with event-triggered input,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 2, pp. 235–245, Feb. 2022. doi: 10.1109/JAS.2021.1004314

|

| [1] |
S. X. Ding, Data-Driven Design of Fault Diagnosis and Fault-Tolerant Control Systems. London: Springer, 2014.
|
| [2] |
D. Zhang, G. Feng, Y. Shi, and D. Srinivasan, “Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 319–333, 2021. doi: 10.1109/JAS.2021.1003820
|
| [3] |
H. Han, Y. Yang, L. Li, and S. X. Ding, “Performance-based fault detection and fault-tolerant control for nonlinear systems with T-S fuzzy implementation,” IEEE Trans. Cybern., vol. 51, no. 2, pp. 801–814, 2021. doi: 10.1109/TCYB.2019.2951534
|
| [4] |
J. Jiang and X. Yu, “Fault-tolerant control systems: A comparative study between active and passive approaches,” Annu. Rev. Control, vol. 36, no. 1, pp. 60–72, 2012. doi: 10.1016/j.arcontrol.2012.03.005
|
| [5] |
H. Li, Y. Wu, and M. Chen, “Adaptive fault-tolerant tracking control for discrete-time multiagent systems via reinforcement learning algorithm,” IEEE Trans. Cybern., vol. 51, no. 3, pp. 1163–1174, 2021. doi: 10.1109/TCYB.2020.2982168
|
| [6] |
H. Noura, D. Sauter, F. Hamelin, and D. Theilliol, “Fault-tolerant control in dynamic systems: Application to a winding machine,” IEEE Control Syst. Mag., vol. 20, no. 1, pp. 33–49, 2000. doi: 10.1109/37.823226
|
| [7] |
C. Edwards and C. P. Tan, “Sensor fault tolerant control using sliding mode observers,” Control Eng. Pract., vol. 14, no. 8, pp. 897–908, 2006. doi: 10.1016/j.conengprac.2005.05.002
|
| [8] |
S. Yin, H. Luo, and S. X. Ding, “Real-time implementation of fault-tolerant control systems with performance optimization,” IEEE Trans. Ind. Electron., vol. 61, no. 5, pp. 2402–2411, 2014. doi: 10.1109/TIE.2013.2273477
|
| [9] |
J. MacGregor and A. Cinar, “Monitoring, fault diagnosis, fault-tolerant control and optimization: Data driven methods,” Comput. Chem. Eng., vol. 47, pp. 111–120, 2012. doi: 10.1016/j.compchemeng.2012.06.017
|
| [10] |
X. Zhang, T. Parisini, and M. M. Polycarpou, “Adaptive fault-tolerant control of nonlinear uncertain systems: An information-based diagnostic approach,” IEEE Trans. Autom. Control, vol. 49, no. 8, pp. 1259–1274, 2004. doi: 10.1109/TAC.2004.832201
|
| [11] |
M. Khalili, X. Zhang, M. M. Polycarpou, T. Parisini, and Y. Cao, “Distributed adaptive fault-tolerant control of uncertain multi-agent systems,” Automatica, vol. 87, pp. 142–151, 2018. doi: 10.1016/j.automatica.2017.09.002
|
| [12] |
H. Li, P. Shi, and D. Yao, “Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 1933–1939, 2016.
|
| [13] |
Y. Song, L. He, D. Zhang, J. Qian, and J. Fu, “Neuroadaptive fault-tolerant control of quadrotor UAVs: A more affordable solution,” IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 7, pp. 1975–1983, 2019. doi: 10.1109/TNNLS.2018.2876130
|
| [14] |
C. Peng and F. Li, “A survey on recent advances in event-triggered communication and control,” Inf. Sci., vol. 457, pp. 113–125, 2018.
|
| [15] |
M. Abdelrahim, R. Postoyan, J. Daafouz, and D. Nešić, “Robust event-triggered output feedback controllers for nonlinear systems,” Automatica, vol. 75, pp. 96–108, 2017. doi: 10.1016/j.automatica.2016.09.044
|
| [16] |
Z. Liu, R. Zheng, W. Lu, and S. Xu, “Using event-based method to estimate cybersecurity equilibrium,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 455–467, 2021. doi: 10.1109/JAS.2020.1003527
|
| [17] |
W. Heemels, K. H. Johansson, and P. Tabuada, “An introduction to event-triggered and self-triggered control,” in Proc. 51st IEEE Conf. Decision Control., 2012, pp. 3270–3285.
|
| [18] |
D. Wang and D. Liu, “Learning and guaranteed cost control with event-based adaptive critic implementation,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 12, pp. 6004–6014, 2018. doi: 10.1109/TNNLS.2018.2817256
|
| [19] |
A. Amini, A. Asif, and A. Mohammadi, “Formation-containment control using dynamic event-triggering mechanism for multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1235–1248, 2020.
|
| [20] |
J. Sun, J. Yang, and S. Li, “Reduced-order GPIO based dynamic event-triggered tracking control of a networked one-DOF link manipulator without velocity measurement,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 725–734, 2020. doi: 10.1109/JAS.2019.1911738
|
| [21] |
P. Tabuada, “Event-triggered real-time scheduling of stabilizing control tasks,” IEEE Trans. Autom. Control, vol. 52, no. 9, pp. 1680–1685, 2007. doi: 10.1109/TAC.2007.904277
|
| [22] |
D. V. Dimarogonas, E. Frazzoli, and K. H. Johansson, “Distributed event-triggered control for multi-agent systems,” IEEE Trans. Autom. Control, vol. 57, no. 5, pp. 1291–1297, 2011.
|
| [23] |
A. Girard, “Dynamic triggering mechanisms for event-triggered control,” IEEE Trans. Autom. Control, vol. 60, no. 7, pp. 1992–1997, 2014.
|
| [24] |
C. De Persis, R. Sailer, and F. Wirth, “Parsimonious event-triggered distributed control: A Zeno free approach,” Automatica, vol. 49, no. 7, pp. 2116–2124, 2013. doi: 10.1016/j.automatica.2013.03.003
|
| [25] |
T. Liu and Z.-P. Jiang, “A small-gain approach to robust event-triggered control of nonlinear systems,” IEEE Trans. Autom. Control, vol. 60, no. 8, pp. 2072–2085, 2015. doi: 10.1109/TAC.2015.2396645
|
| [26] |
L. Xing, C. Wen, Z. Liu, H. Su, and J. Cai, “Adaptive compensation for actuator failures with event-triggered input,” Automatica, vol. 85, pp. 129–136, 2017. doi: 10.1016/j.automatica.2017.07.061
|
| [27] |
Y. H. Choi and S. J. Yoo, “Event-triggered decentralized adaptive fault-tolerant control of uncertain interconnected nonlinear systems with actuator failures,” ISA Trans., vol. 77, pp. 77–89, 2018. doi: 10.1016/j.isatra.2018.04.011
|
| [28] |
H. Liang, G. Liu, H. Zhang, and T. Huang, “Neural network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 5, pp. 2239–2250, 2021. doi: 10.1109/TNNLS.2020.3003950
|
| [29] |
C. Wang, L. Guo, and J. Qiao, “Event-triggered adaptive fault-tolerant control for nonlinear systems fusing static and dynamic information,” J. Franklin Inst., vol. 356, no. 1, pp. 248–267, 2019. doi: 10.1016/j.jfranklin.2018.09.036
|
| [30] |
Q.-Y. Fan and G.-H. Yang, “Event-based fuzzy adaptive fault-tolerant control for a class of nonlinear systems,” IEEE Trans. Fuzzy Syst., vol. 26, no. 5, pp. 2686–2698, 2018. doi: 10.1109/TFUZZ.2018.2800724
|
| [31] |
K. Sun, L. Liu, J. Qiu, and G. Feng, “Fuzzy adaptive finite-time fault-tolerant control for strict-feedback nonlinear systems,” IEEE Trans. Fuzzy Syst., vol. 29, no. 4, pp. 786–796, 2021.
|
| [32] |
P. Panagi and M. M. Polycarpou, “Distributed fault accommodation for a class of interconnected nonlinear systems with partial communication,” IEEE Trans. Autom. Control, vol. 56, no. 12, pp. 2962–2967, 2011. doi: 10.1109/TAC.2011.2166313
|
| [33] |
X. Zhang, Q. Zhang, and N. Sonti, “Diagnosis of process faults and sensor faults in a class of nonlinear uncertain systems,” J. Syst. Eng. Electron., vol. 22, no. 1, pp. 22–32, 2011. doi: 10.3969/j.issn.1004-4132.2011.01.003
|
| [34] |
H. Li, Z. Chen, L. Wu, H.-K. Lam, and H. Du, “Event-triggered fault detection of nonlinear networked systems,” IEEE Trans. Cybern., vol. 47, no. 4, pp. 1041–1052, 2017. doi: 10.1109/TCYB.2016.2536750
|
| [35] |
M. Polycarpou and P. Ioannou, “A robust adaptive nonlinear control design,” Automatica, vol. 32, no. 3, pp. 423–427, 1996. doi: 10.1016/0005-1098(95)00147-6
|
| [36] |
H. Zhang, F. L. Lewis, and Z. Qu, “Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs,” IEEE Trans. Ind. Electron., vol. 59, no. 7, pp. 3026–3041, 2011.
|

Figures(4) / Tables(1)






 DownLoad:
DownLoad: