A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 5
Volume 11
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | K. Li, S. Zhao, B. Huang, and F. Liu, “Bayesian filtering for high-dimensional state-space models with state partition and error compensation,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1239–1249, May 2024. doi: 10.1109/JAS.2023.124137

|
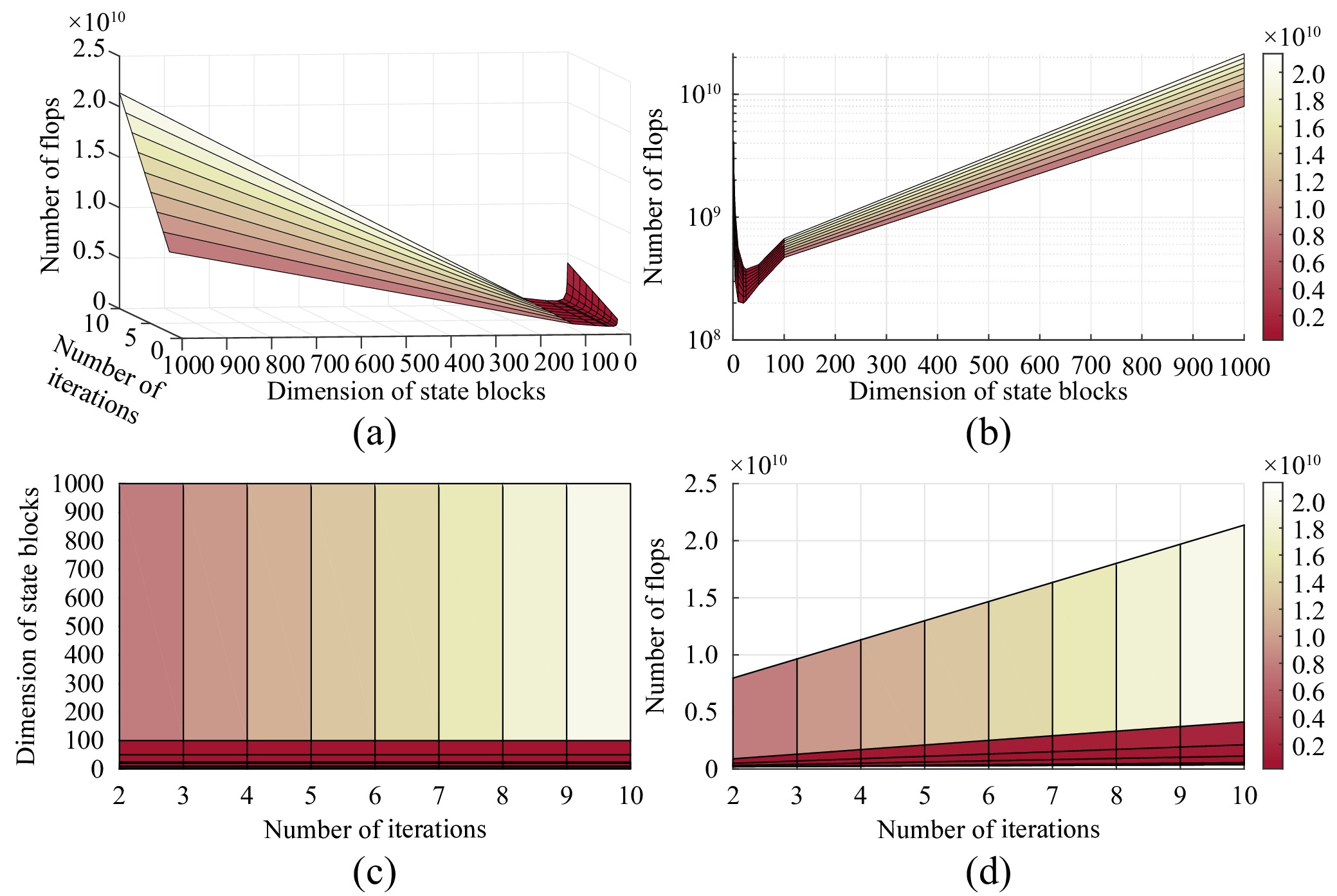
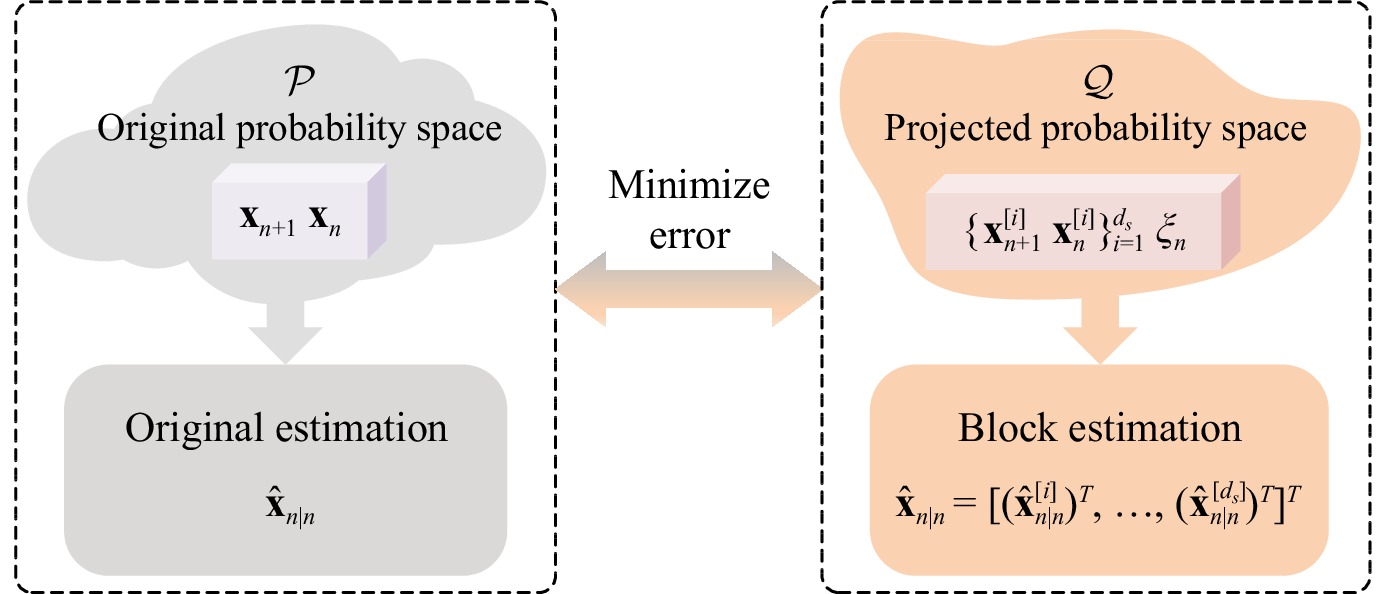
In the era of exponential growth of data availability, the architecture of systems has a trend toward high dimensionality, and directly exploiting holistic information for state inference is not always computationally affordable. This paper proposes a novel Bayesian filtering algorithm that considers algorithmic computational cost and estimation accuracy for high-dimensional linear systems. The high-dimensional state vector is divided into several blocks to save computation resources by avoiding the calculation of error covariance with immense dimensions. After that, two sequential states are estimated simultaneously by introducing an auxiliary variable in the new probability space, mitigating the performance degradation caused by state segmentation. Moreover, the computational cost and error covariance of the proposed algorithm are analyzed analytically to show its distinct features compared with several existing methods. Simulation results illustrate that the proposed Bayesian filtering can maintain a higher estimation accuracy with reasonable computational cost when applied to high-dimensional linear systems.

| [1] |
T. Kailath, A. H. Sayed, and B. Hassibi, Linear Estimation. Upper Saddle River, USA: Prentice Hall, 2000.
|
| [2] |
D. Simon, Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches. Hoboken, USA: John Wiley & Sons, 2006.
|
| [3] |
Q. Ge, X. Hu, Y. Li, H. He, and Z. Song, “A novel adaptive Kalman filter based on credibility measure,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 103–120, 2023. doi: 10.1109/JAS.2023.123012
|
| [4] |
H. S. Hoang and R. Baraille, “Prediction error sampling procedure based on dominant schur decomposition. Application to state estimation in high dimensional oceanic model,” Applied Mathematics and Computation, vol. 218, no. 7, pp. 3689–3709, 2011. doi: 10.1016/j.amc.2011.09.012
|
| [5] |
B. Ait-El-Fquih, T. Rodet, and I. Hoteit, “Unsupervised variational Bayesian Kalman filtering for large-dimensional Gaussian systems,” in Proc. IEEE Int. Conf. Acoustics, Speech and Signal Processing, 2020, pp. 5870–5874.
|
| [6] |
L. N. Trefethen and D. Bau III, Numerical Linear Algebra. Philadelphia, USA: SIAM, 1997.
|
| [7] |
B. Ait-El-Fquih and I. Hoteit, “Fast Kalman-like filtering for large-dimensional linear and Gaussian state-space models,” IEEE Trans. Signal Processing, vol. 63, no. 21, pp. 5853–5867, 2015. doi: 10.1109/TSP.2015.2468674
|
| [8] |
B. Shen, Z. Wang, D. Ding, and H. Shu, “H∞ state estimation for complex networks with uncertain inner coupling and incomplete measurements,” IEEE Trans. Neural Networks and Learning Systems, vol. 24, no. 12, pp. 2027–2037, 2013. doi: 10.1109/TNNLS.2013.2271357
|
| [9] |
J. Qian, P. Duan, Z. Duan, G. Chen, and L. Shi, “Consensus-based distributed filtering with fusion step analysis,” Autom., vol. 142, p. 110408, 2022. doi: 10.1016/j.automatica.2022.110408
|
| [10] |
G. Evensen, “The ensemble Kalman filter: Theoretical formulation and practical implementation,” Ocean Dynamics, vol. 53, no. 4, pp. 343–367, 2003. doi: 10.1007/s10236-003-0036-9
|
| [11] |
P. L. Houtekamer and H. L. Mitchell, “Ensemble Kalman filtering,” Quarterly J. Royal Meteorological Society, vol. 131, no. 613, pp. 3269–3289, 2005. doi: 10.1256/qj.05.135
|
| [12] |
G. Evensen, Data Assimilation: The Ensemble Kalman Filter. Berlin, Germany: Springer Science & Business Media, 2009.
|
| [13] |
R. J. Lorentzen and G. Nævdal, “An iterative ensemble Kalman filter,” IEEE Trans. Autom. Control, vol. 56, no. 8, pp. 1990–1995, 2011. doi: 10.1109/TAC.2011.2154430
|
| [14] |
R. Li, N. M. Jan, B. Huang, and V. Prasad, “Constrained ensemble Kalman filter based on Kullback-Leibler divergence,” J. Process Control, vol. 81, pp. 150–161, 2019. doi: 10.1016/j.jprocont.2019.05.011
|
| [15] |
K. Li, T. Zhang, S. Zhao, and F. Liu, “Suboptimal Bayesian state estimators for linear high-dimensional dynamic processes,” J. Process Control, vol. 105, pp. 88–98, 2021. doi: 10.1016/j.jprocont.2021.07.005
|
| [16] |
A. K. Singh, “Major development under Gaussian filtering since unscented Kalman filter,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1308–1325, 2020. doi: 10.1109/JAS.2020.1003303
|
| [17] |
U. Orguner, Improved State Estimation for Jump Markov Linear Systems. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2005.
|
| [18] |
L. Chen, L. Wang, Z. Han, J. Zhao, and W. Wang, “Variational inference based kernel dynamic Bayesian networks for construction of prediction intervals for industrial time series with incomplete input,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1437–1445, 2020. doi: 10.1109/JAS.2019.1911645
|
| [19] |
T. S. Jaakkola, “Tutorial on variational approximation methods,” in Advanced Mean Field Methods: Theory and Practice, pp. 129–159, Cambridge, USA: The MIT Press, 2001.
|
| [20] |
V. Šmídl and A. Quinn, The Variational Bayes Method in Signal Processing. Heidelberg, Germany: Springer Science & Business Media, 2006.
|
| [21] |
V. Smidl and A. Quinn, “Variational Bayesian filtering,” IEEE Trans. Signal Processing, vol. 56, no. 10, pp. 5020–5030, 2008. doi: 10.1109/TSP.2008.928969
|
| [22] |
A. Hamadouche, A. Kouadri, and A. Bakdi, “A modified Kullback divergence for direct fault detection in large scale systems,” J. Process Control, vol. 59, pp. 28–36, 2017. doi: 10.1016/j.jprocont.2017.09.004
|
| [23] |
R. Weinstock, Calculus of Variations: With Applications to Physics and Engineering. New York, USA: Courier Corporation, 1974.
|
| [24] |
Y. Ma, S. Zhao, and B. Huang, “Multiple-model state estimation based on variational Bayesian inference,” IEEE Trans. Autom. Control, vol. 64, no. 4, pp. 1679–1685, 2018.
|
| [25] |
Y. Huang, Y. Zhang, N. Li, Z. Wu, and J. A. Chambers, “A novel robust Student’s t-based Kalman filter,” IEEE Trans. Aerospace and Electronic Systems, vol. 53, no. 3, pp. 1545–1554, 2017. doi: 10.1109/TAES.2017.2651684
|
| [26] |
Y. Huang, Y. Zhang, P. Shi, Z. Wu, J. Qian, and J. A. Chambers, “Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 49, no. 10, pp. 2082–2096, 2017.
|
| [27] |
M. S. Ramadan and R. R. Bitmead, “Maximum likelihood recursive state estimation using the expectation maximization algorithm,” Autom., vol. 144, p. 110482, 2022. doi: 10.1016/j.automatica.2022.110482
|
| [28] |
M.-A. Sato, “Online model selection based on the variational Bayes,” Neural Computation, vol. 13, no. 7, pp. 1649–1681, 2001. doi: 10.1162/089976601750265045
|
| [29] |
S. Zhao and B. Huang, “Trial-and-error or avoiding a guess? Initialization of the Kalman filter,” Autom., vol. 121, p. 109184, 2020. doi: 10.1016/j.automatica.2020.109184
|
| [30] |
B. Ni and Q. Zhang, “Kalman filter for process noise free systems,” IFAC Proceedings Volumes, vol. 46, no. 11, pp. 176–181, 2013.
|
| [31] |
G. Evensen, “Sequential data assimilation with a nonlinear quasi-geostrophic model using monte carlo methods to forecast error statistics,” J. Geophysical Research: Oceans, vol. 99, no. C5, pp. 10143–10162, 1994. doi: 10.1029/94JC00572
|
| [32] |
R. M. Gray, Toeplitz and Circulant Matrices: A Review. Boston, USA: Now Publishers, INC., 2006.
|
Figures(8)






 DownLoad:
DownLoad: