A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 12
Volume 10
Issue 12
IEEE/CAA Journal of Automatica Sinica
| Citation: | D. D. Yue, S. Baldi, J. D. Cao, Q. Li, and B. De Schutter, “Distributed adaptive resource allocation: An uncertain saddle-point dynamics viewpoint,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 12, pp. 2209–2221, Dec. 2023. doi: 10.1109/JAS.2023.123402

|
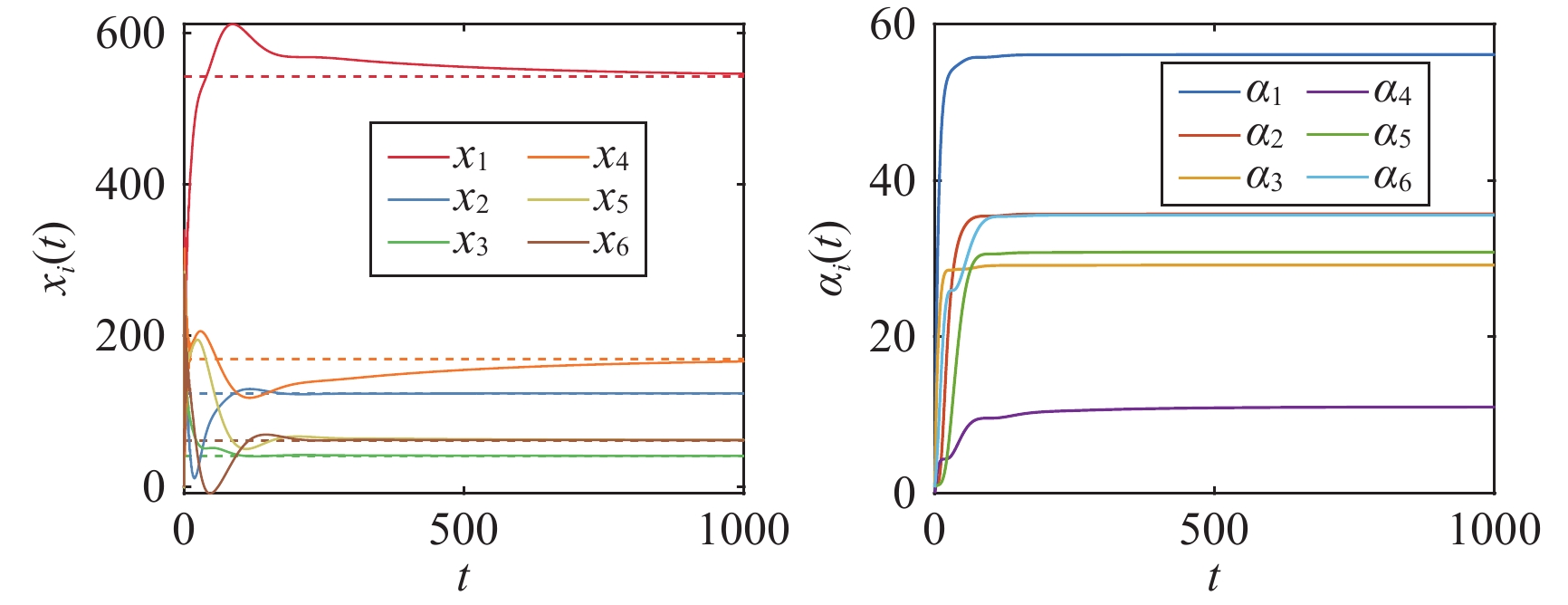
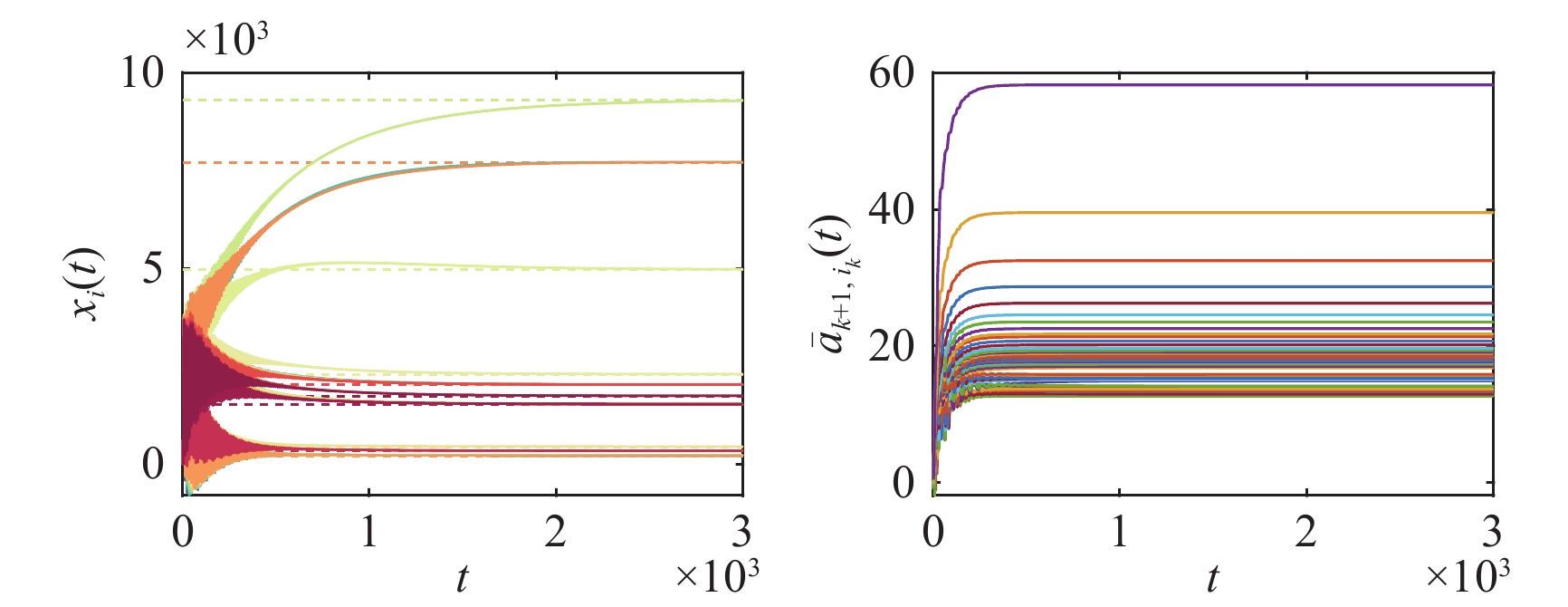
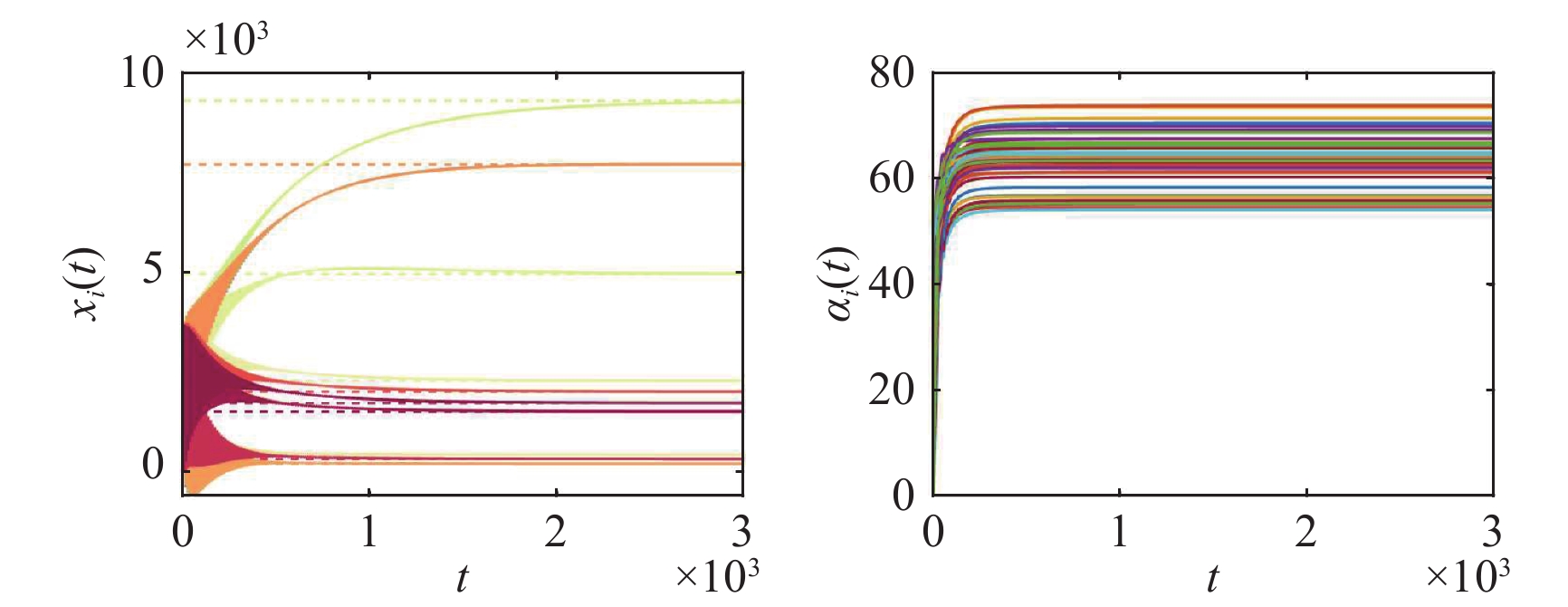
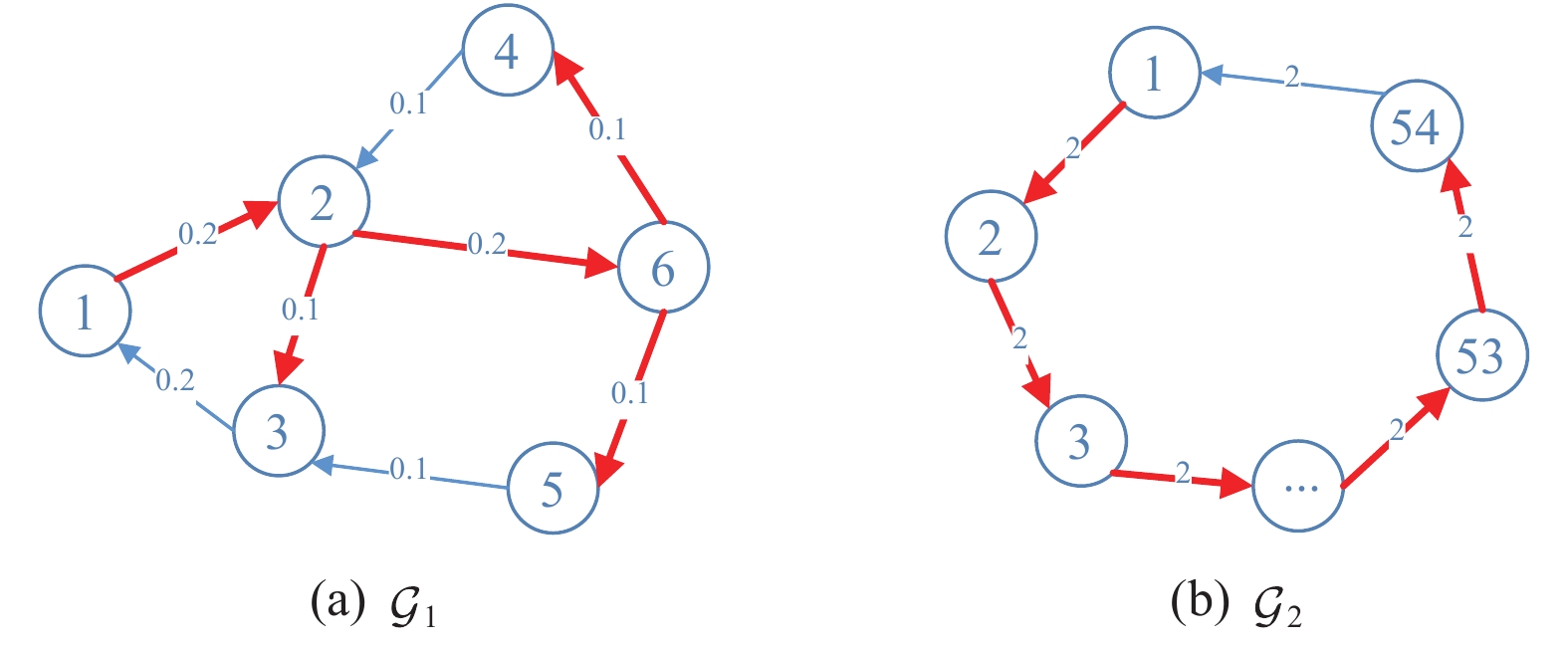
This paper addresses distributed adaptive optimal resource allocation problems over weight-balanced digraphs. By leveraging state-of-the-art adaptive coupling designs for multiagent systems, two adaptive algorithms are proposed, namely a directed-spanning-tree-based algorithm and a node-based algorithm. The benefits of these algorithms are that they require neither sufficiently small or unitary step sizes, nor global knowledge of Laplacian eigenvalues, which are widely required in the literature. It is shown that both algorithms belong to a class of uncertain saddle-point dynamics, which can be tackled by repeatedly adopting the Peter-Paul inequality in the framework of Lyapunov theory. Thanks to this new viewpoint, global asymptotic convergence of both algorithms can be proven in a unified way. The effectiveness of the proposed algorithms is validated through numerical simulations and case studies in IEEE 30-bus and 118-bus power systems.

| [1] |
T. Ibaraki and N. Katoh, Resource Allocation Problems: Algorithmic Approaches. Cambridge, USA: MIT Press, 1988.
|
| [2] |
J. W. Simpson-Porco, B. K. Poolla, N. Monshizadeh, and F. Dörfler, “Input-output performance of linear-quadratic saddle-point algorithms with application to distributed resource allocation problems,” IEEE Trans. Autom. Control, vol. 65, no. 5, pp. 2032–2045, 2020. doi: 10.1109/TAC.2019.2927328
|
| [3] |
W.-T. Lin, Y.-W. Wang, C. Li, and X. Yu, “Distributed resource allocation via accelerated saddle point dynamics,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 9, pp. 1588–1599, 2021. doi: 10.1109/JAS.2021.1004114
|
| [4] |
P. Yi, Y. Hong, and F. Liu, “Initialization-free distributed algorithms for optimal resource allocation with feasibility constraints and application to economic dispatch of power systems,” Automatica, vol. 74, pp. 259–269, 2016. doi: 10.1016/j.automatica.2016.08.007
|
| [5] |
B. Gharesifard, T. Başar, and A. D. Domínguez-García, “Price-based coordinated aggregation of networked distributed energy resources,” IEEE Trans. Autom. Control, vol. 61, no. 10, pp. 2936–2946, 2016. doi: 10.1109/TAC.2015.2504964
|
| [6] |
Z. Li and Z. Ding, “Distributed multiobjective optimization for network resource allocation of multiagent systems,” IEEE Trans. Cybern., vol. 51, no. 12, pp. 5800–5810, 2020.
|
| [7] |
Q. Liu, X. Le, and K. Li, “A distributed optimization algorithm based on multiagent network for economic dispatch with region partitioning,” IEEE Trans. Cybern., vol. 51, no. 5, pp. 2466–2475, 2021. doi: 10.1109/TCYB.2019.2948424
|
| [8] |
C. Li, X. Yu, T. Huang, and X. He, “Distributed optimal consensus over resource allocation network and its application to dynamical economic dispatch,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 6, pp. 2407–2418, 2018. doi: 10.1109/TNNLS.2017.2691760
|
| [9] |
A. Nedić, A. Olshevsky, and W. Shi, “Improved convergence rates for distributed resource allocation,” in Proc. IEEE Conf. Decis. Control, 2018, pp. 172–177.
|
| [10] |
L. Bai, C. Sun, Z. Feng, and G. Hu, “Distributed continuous-time resource allocation with time-varying resources under quadratic cost functions,” in Proc. IEEE Conf. Decis. Control, 2018, pp. 823–828.
|
| [11] |
H. Yun, H. Shim, and H.-S. Ahn, “Initialization-free privacy-guaranteed distributed algorithm for economic dispatch problem,” Automatica, vol. 102, pp. 86–93, 2019. doi: 10.1016/j.automatica.2018.12.033
|
| [12] |
P. Dai, W. Yu, G. Wen, and S. Baldi, “Distributed reinforcement learning algorithm for dynamic economic dispatch with unknown generation cost functions,” IEEE Trans. Ind. Inform., vol. 16, no. 4, pp. 2258–2267, 2020. doi: 10.1109/TII.2019.2933443
|
| [13] |
A. Cherukuri and J. Cortés, “Distributed generator coordination for initialization and anytime optimization in economic dispatch,” IEEE Trans. Control Netw. Syst., vol. 2, no. 3, pp. 226–237, 2015. doi: 10.1109/TCNS.2015.2399191
|
| [14] |
A. Cherukuri and J. Cortés, “Initialization-free distributed coordination for economic dispatch under varying loads and generator commitment,” Automatica, vol. 74, pp. 183–193, 2016. doi: 10.1016/j.automatica.2016.07.003
|
| [15] |
Z. Deng, S. Liang, and Y. Hong, “Distributed continuous-time algorithms for resource allocation problems over weight-balanced digraphs,” IEEE Trans. Cybern., vol. 48, no. 11, pp. 3116–3125, 2018. doi: 10.1109/TCYB.2017.2759141
|
| [16] |
Z. Deng, X. Nian, and C. Hu, “Distributed algorithm design for nonsmooth resource allocation problems,” IEEE Trans. Cybern., vol. 50, no. 7, pp. 3208–3217, 2020. doi: 10.1109/TCYB.2019.2901256
|
| [17] |
S. S. Kia, “Distributed optimal in-network resource allocation algorithm design via a control theoretic approach,” Syst. Control Lett., vol. 107, pp. 49–57, 2017. doi: 10.1016/j.sysconle.2017.07.012
|
| [18] |
S. Liang, X. Zeng, and Y. Hong, “Distributed sub-optimal resource allocation over weight-balanced graph via singular perturbation,” Automatica, vol. 95, pp. 222–228, 2018. doi: 10.1016/j.automatica.2018.05.013
|
| [19] |
H. Li, Q. Lv, and T. Huang, “Convergence analysis of a distributed optimization algorithm with a general unbalanced directed communication network,” IEEE Trans. Netw. Sci. Eng., vol. 6, no. 3, pp. 237–248, 2019. doi: 10.1109/TNSE.2018.2848288
|
| [20] |
J. Zhang, K. You, and K. Cai, “Distributed dual gradient tracking for resource allocation in unbalanced networks,” IEEE Trans. Signal Process., vol. 68, pp. 2186–2198, 2020. doi: 10.1109/TSP.2020.2981762
|
| [21] |
Y. Zhu, W. Ren, W. Yu, and G. Wen, “Distributed resource allocation over directed graphs via continuous-time algorithms,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 2, pp. 1097–1106, 2019.
|
| [22] |
J. Mei, W. Ren, J. Chen, and B. D. O. Anderson, “Consensus of linear multi-agent systems with fully distributed control gains under a general directed graph,” in Proc. IEEE Conf. Decis. Control, 2014, pp. 2993–2998.
|
| [23] |
Z. Li, G. Wen, Z. Duan, and W. Ren, “Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs,” IEEE Trans. Autom. Control, vol. 60, no. 4, pp. 1152–1157, 2015. doi: 10.1109/TAC.2014.2350391
|
| [24] |
W. Yu, J. Lu, X. Yu, and G. Chen, “Distributed adaptive control for synchronization in directed complex networks,” SIAM J. Control Optim., vol. 53, no. 5, pp. 2980–3005, 2015. doi: 10.1137/140970781
|
| [25] |
J. Mei, W. Ren, and J. Chen, “Distributed consensus of second-order multi-agent systems with heterogeneous unknown inertias and control gains under a directed graph,” IEEE Trans. Autom. Control, vol. 61, no. 8, pp. 2019–2034, 2016. doi: 10.1109/TAC.2015.2480336
|
| [26] |
Z. Li, L. Gao, W. Chen, and Y. Xu, “Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 292–300, 2019.
|
| [27] |
G. Wen, G. Hu, Z. Zuo, Y. Zhao, and J. Cao, “Robust containment of uncertain linear multi-agent systems under adaptive protocols,” Int. J. Robust Nonlinear Control, vol. 27, no. 12, pp. 2053–2069, 2017. doi: 10.1002/rnc.3670
|
| [28] |
D. Yue, S. Baldi, J. Cao, Q. Li, and B. De Schutter, “A directed spanning tree adaptive control solution to time-varying formations,” IEEE Trans. Control Netw. Syst., vol. 8, no. 2, pp. 690–701, 2021. doi: 10.1109/TCNS.2021.3050332
|
| [29] |
D. Yue, J. Cao, Q. Li, and M. Abdel-Aty, “Distributed neuro-adaptive formation control for uncertain multi-agent systems: Node- and edge-based designs,” IEEE Trans. Netw. Sci. Eng., vol. 7, no. 4, pp. 2656–2666, 2020. doi: 10.1109/TNSE.2020.2975581
|
| [30] |
Z. Li, Z. Ding, J. Sun, and Z. Li, “Distributed adaptive convex optimization on directed graphs via continuous-time algorithms,” IEEE Trans. Autom. Control, vol. 63, no. 5, pp. 1434–1441, 2017.
|
| [31] |
D. Yue, S. Baldi, J. Cao, and B. De Schutter, “Distributed adaptive optimization with weight-balancing,” IEEE Trans. Autom. Control, vol. 67, no. 4, pp. 2068–2075, 2022. doi: 10.1109/TAC.2021.3071651
|
| [32] |
Q. Yang, G. Chen, and T. Wang, “ADMM-based distributed algorithm for economic dispatch in power systems with both packet drops and communication delays,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 842–852, 2020. doi: 10.1109/JAS.2020.1003156
|
| [33] |
M. Krstić, I. Kanellakopoulos, and P. V. Kokotović, Nonlinear and Adaptive Control Design. New York, USA: Wiley, 1995.
|
| [34] |
W. Ren and R. W. Beard, Distributed Consensus in Multi-Vehicle Cooperative Control. London, UK: Springer London, 2008.
|
| [35] |
C. W. Wu and L. O. Chua, “Synchronization in an array of linearly coupled dynamical systems,” IEEE Trans. Circuits Syst. I,Reg. Papers,, vol. 42, no. 8, pp. 430–447, 1995. doi: 10.1109/81.404047
|
| [36] |
W. Yu, G. Chen, M. Cao, and J. Kurths, “Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics,” IEEE Trans. Syst.,Man,Cybern. B,Cybern., vol. 40, no. 3, pp. 881–891, 2010. doi: 10.1109/TSMCB.2009.2031624
|
| [37] |
S. Boyd and L. Vandenberghe, Convex Optimization. NewYork, USA: Cambrige Universiy Press, 2004.
|
| [38] |
P. Humblet, “A distributed algorithm for minimum weight directed spanning trees,” IEEE Trans. Commun., vol. 31, no. 6, pp. 756–762, 1983. doi: 10.1109/TCOM.1983.1095883
|
| [39] |
S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in System and Control Theory. Philadelphia, USA: SIAM, 1994, vol. 15.
|
| [40] |
“IEEE 30 bus test case,” 1999. [Online], Available: https://www.ee.washington.edu/research/pstca/pf30/pg_tca30bus.htm. Accessed: Sept. 2023.
|
| [41] |
“IEEE 118 bus test case,” 1999. [Online], Available: https://www.ee.washington.edu/research/pstca/pf118/pg_tca118bus.htm. Accessed: Sept. 2023.
|
| [42] |
W. Yu, C. Li, X. Yu, G. Wen, and J. Lü, “Economic power dispatch in smart grids: A framework for distributed optimization and consensus dynamics,” Sci. China Inf. Sci., vol. 61, no. 1, pp. 1–16, 2018.
|
| [43] |
F. Bullo, J. Cortés, and S. Martínez, Distributed Control of Robotic Networks. Princeton, USA: Princeton University Press, 2009.
|
| [44] |
G. Tao, “Model reference adaptive control with L1+α tracking,” Int. J. Control, vol. 64, no. 5, pp. 859–870, 1996. doi: 10.1080/00207179608921661
|
| [45] |
M. Hosseinzadeh and M. J. Yazdanpanah, “Performance enhanced model reference adaptive control through switching non-quadratic lyapunov functions,” Syst. Control Lett., vol. 76, pp. 47–55, 2015. doi: 10.1016/j.sysconle.2014.12.001
|
Figures(12) / Tables(1)






 DownLoad:
DownLoad: