A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 6
Volume 11
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Chen, J. Tang, and Z. Zuo, “A novel prescribed-performance path-following problem for non-holonomic vehicles,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 6, pp. 1476–1484, Jun. 2024. doi: 10.1109/JAS.2024.124311

|
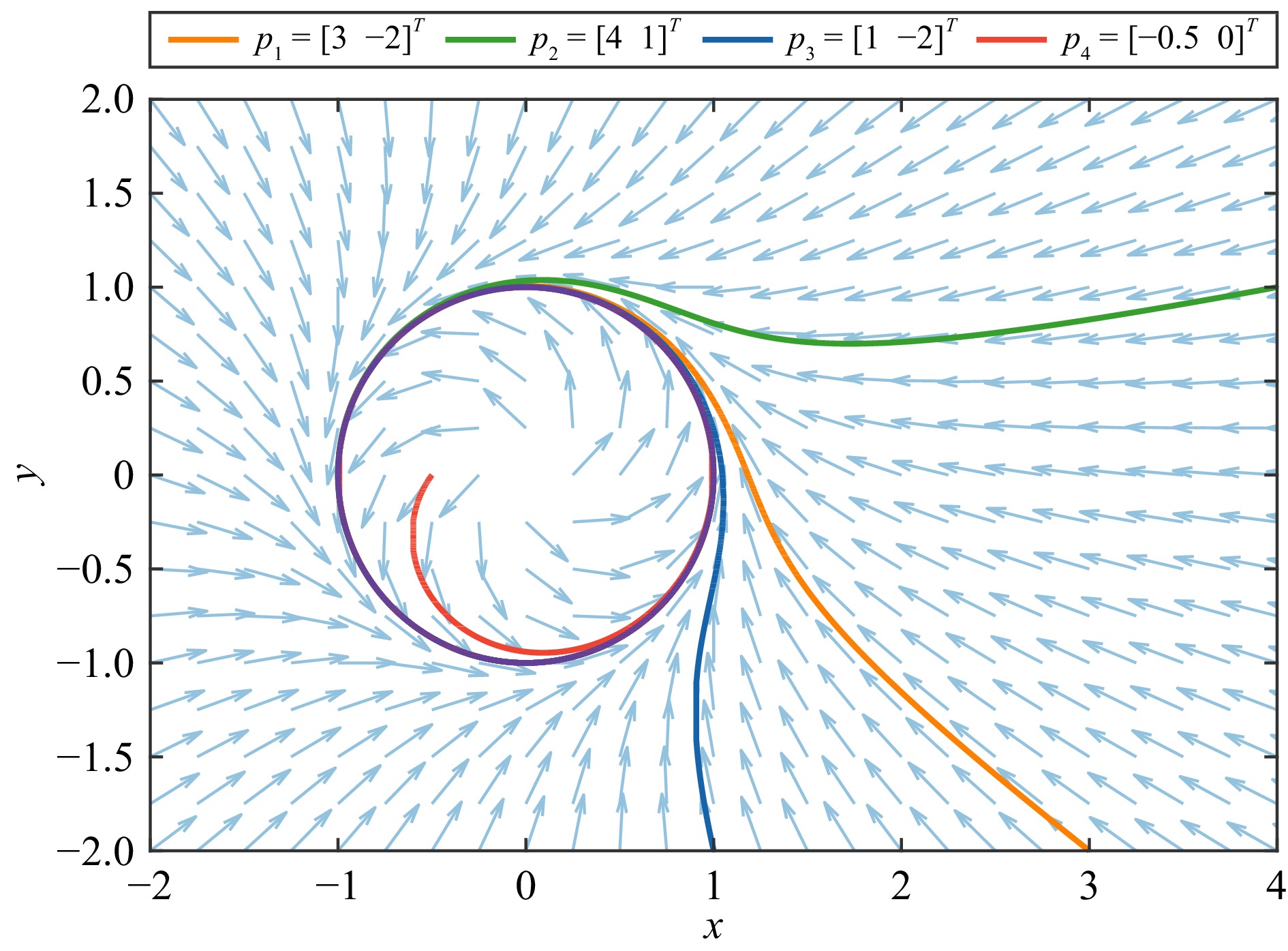
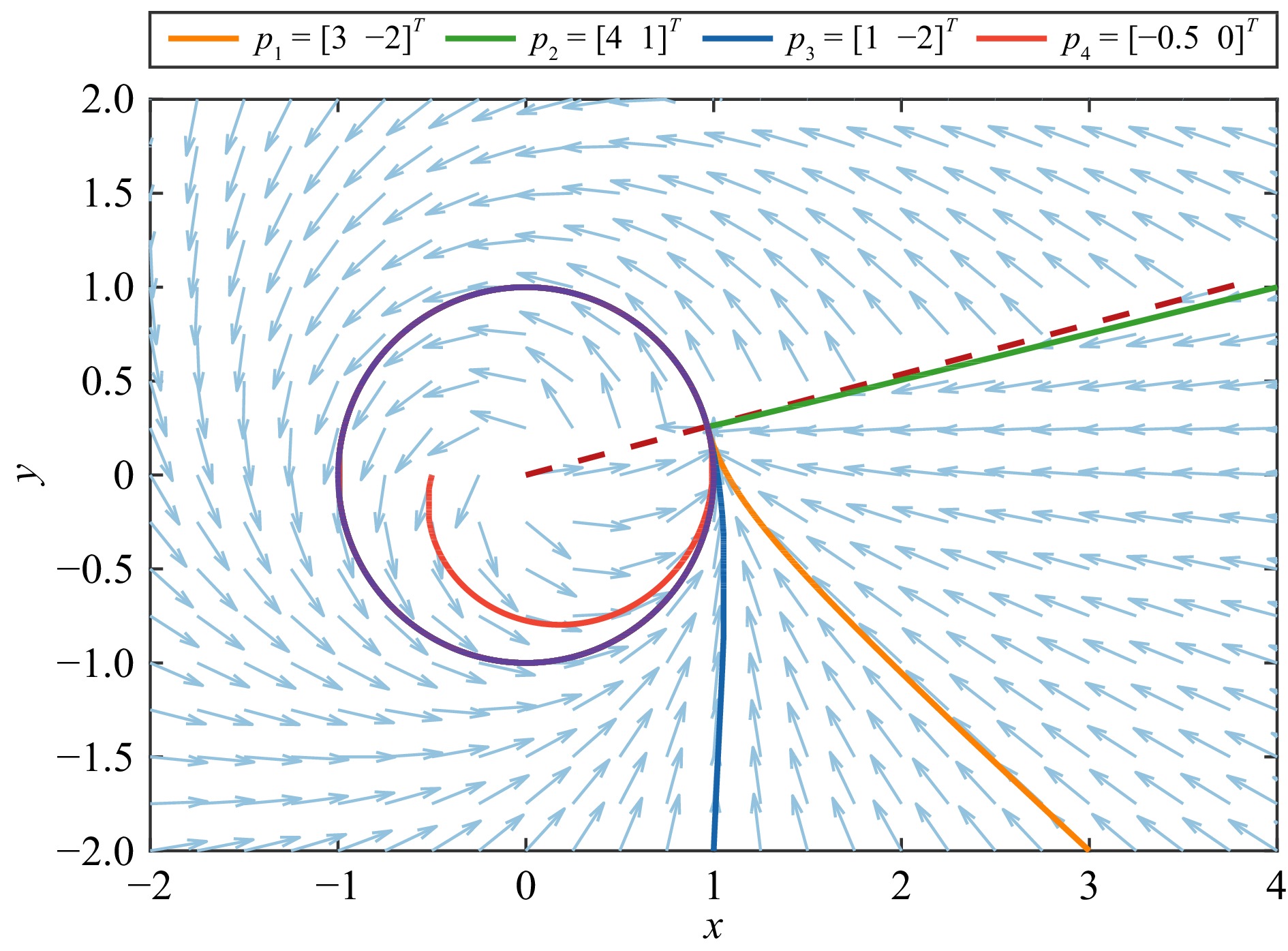
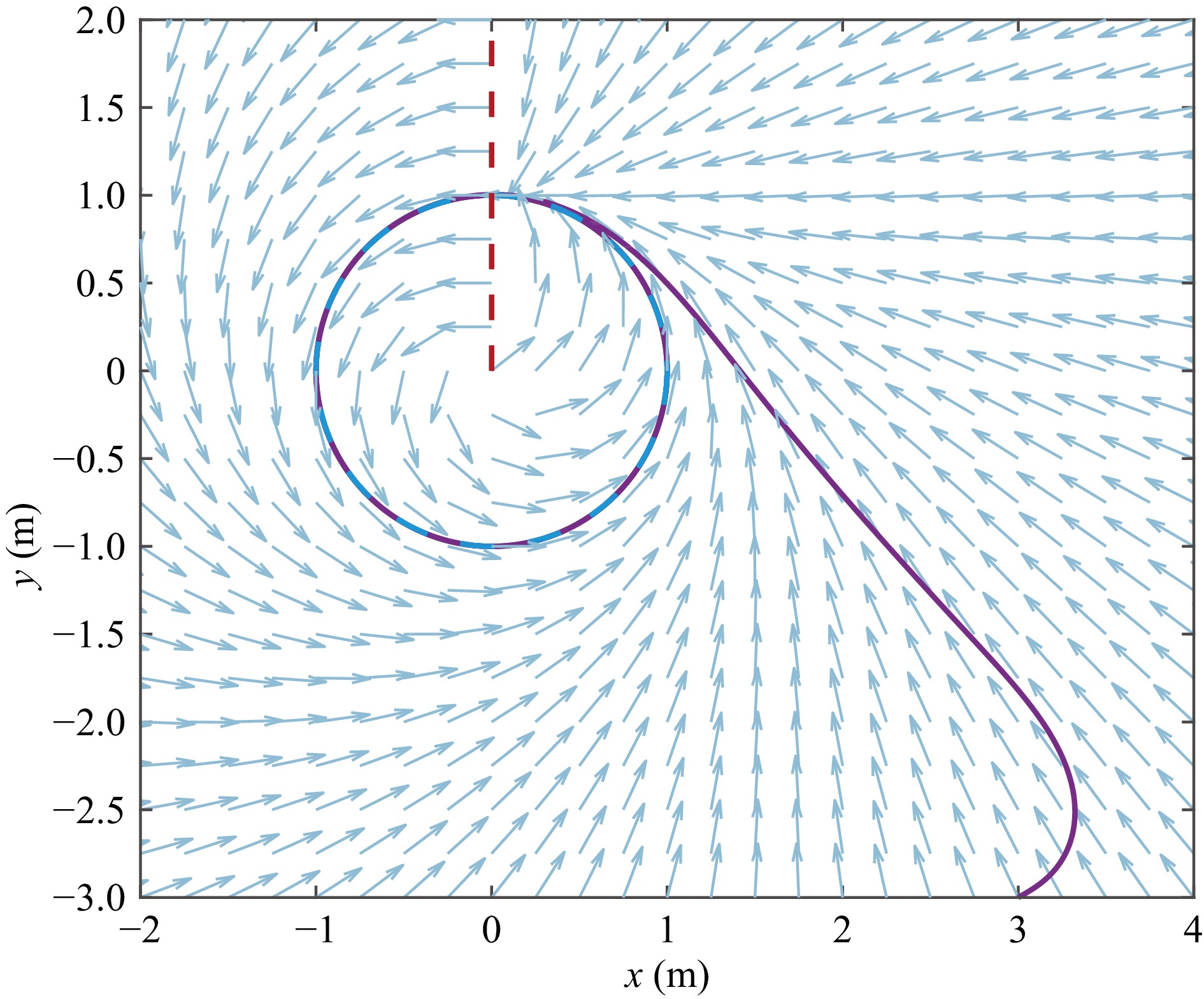
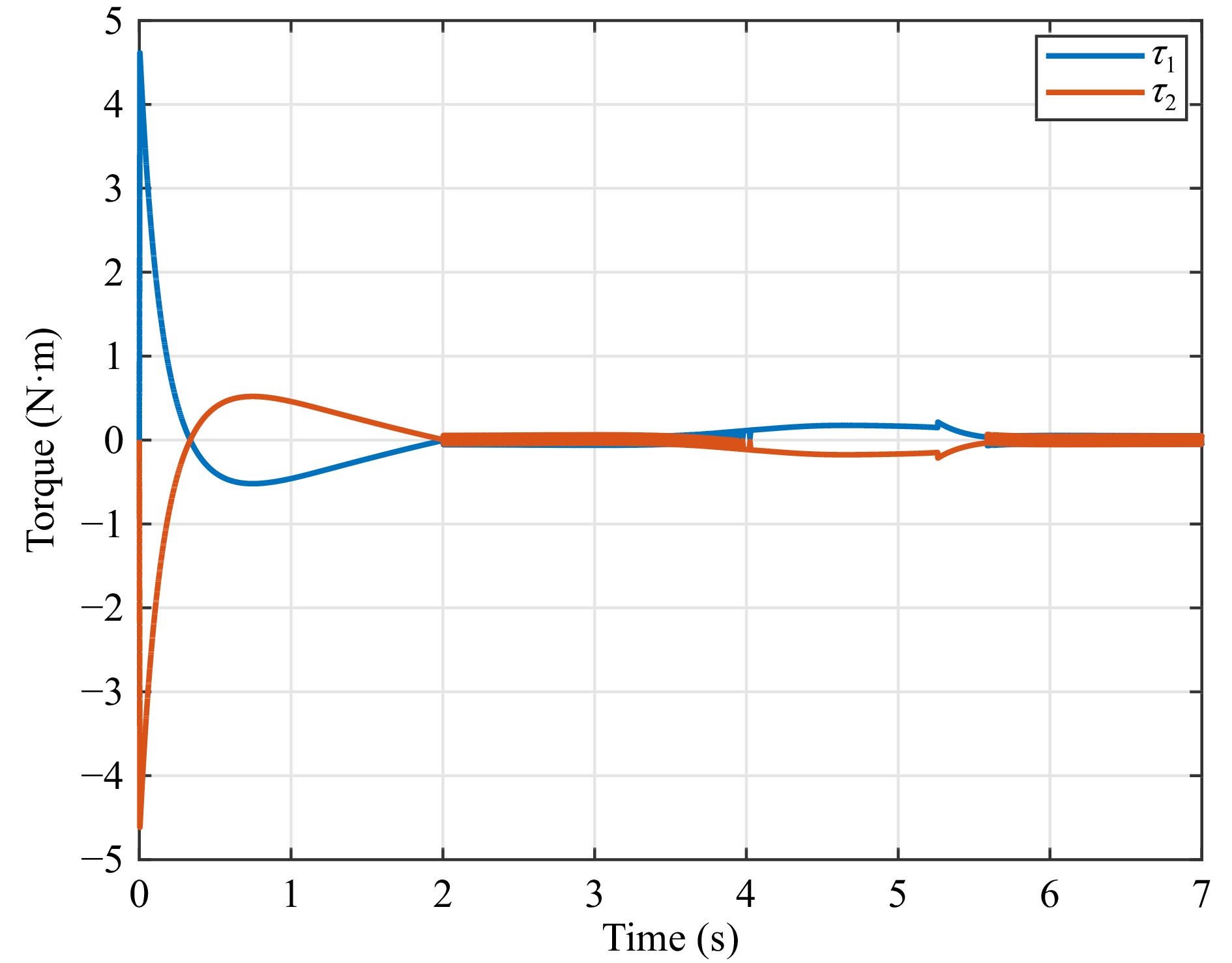
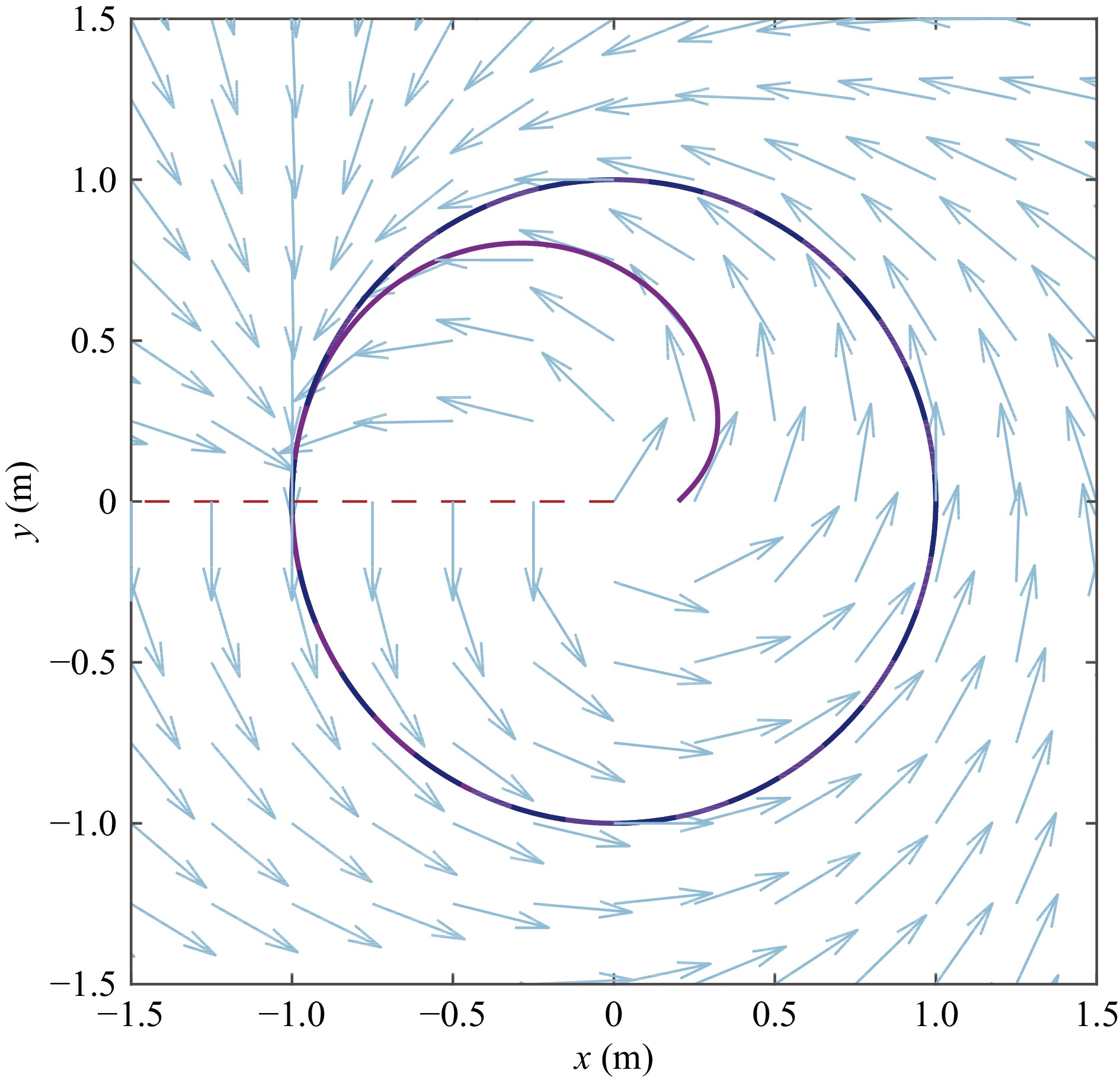
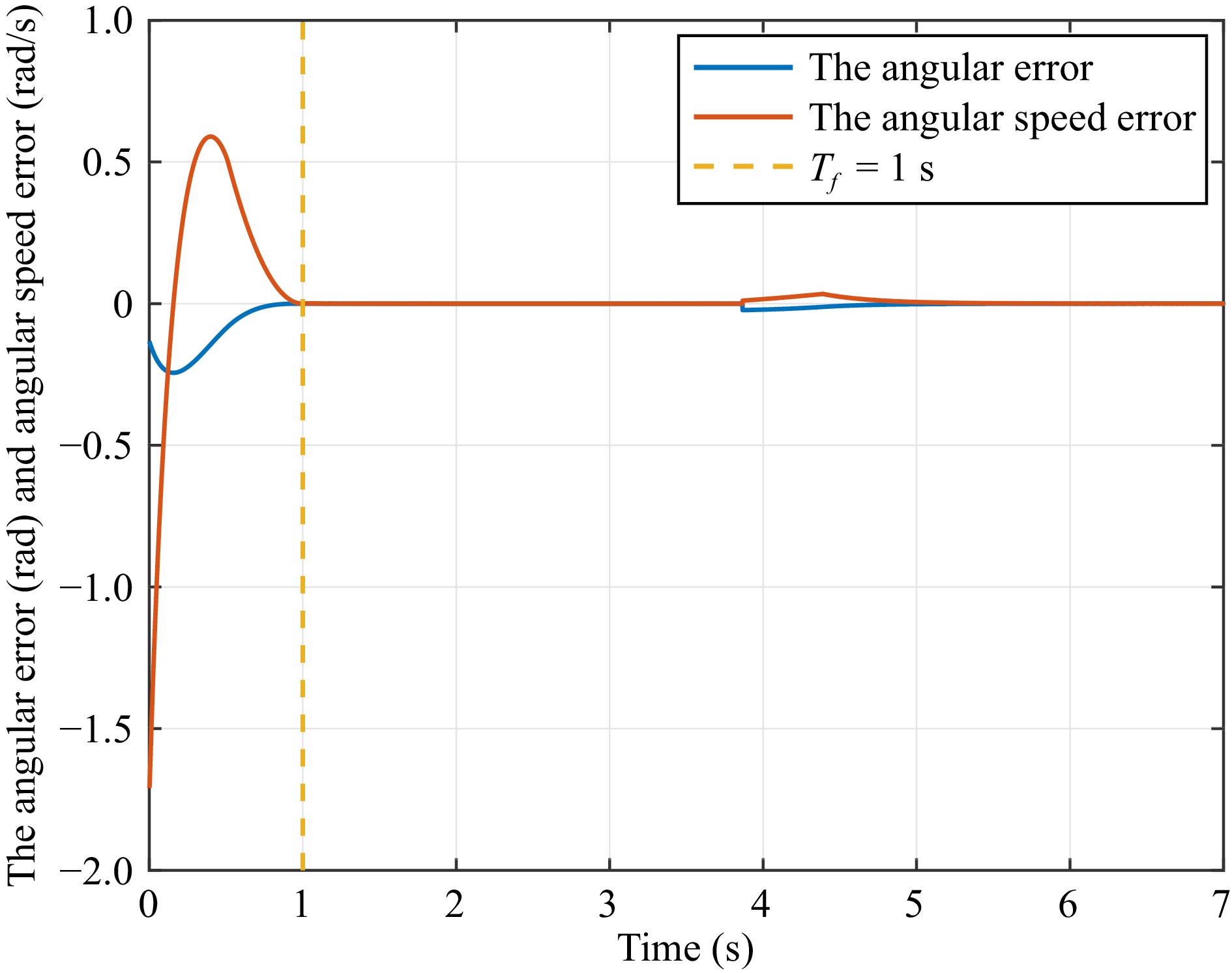
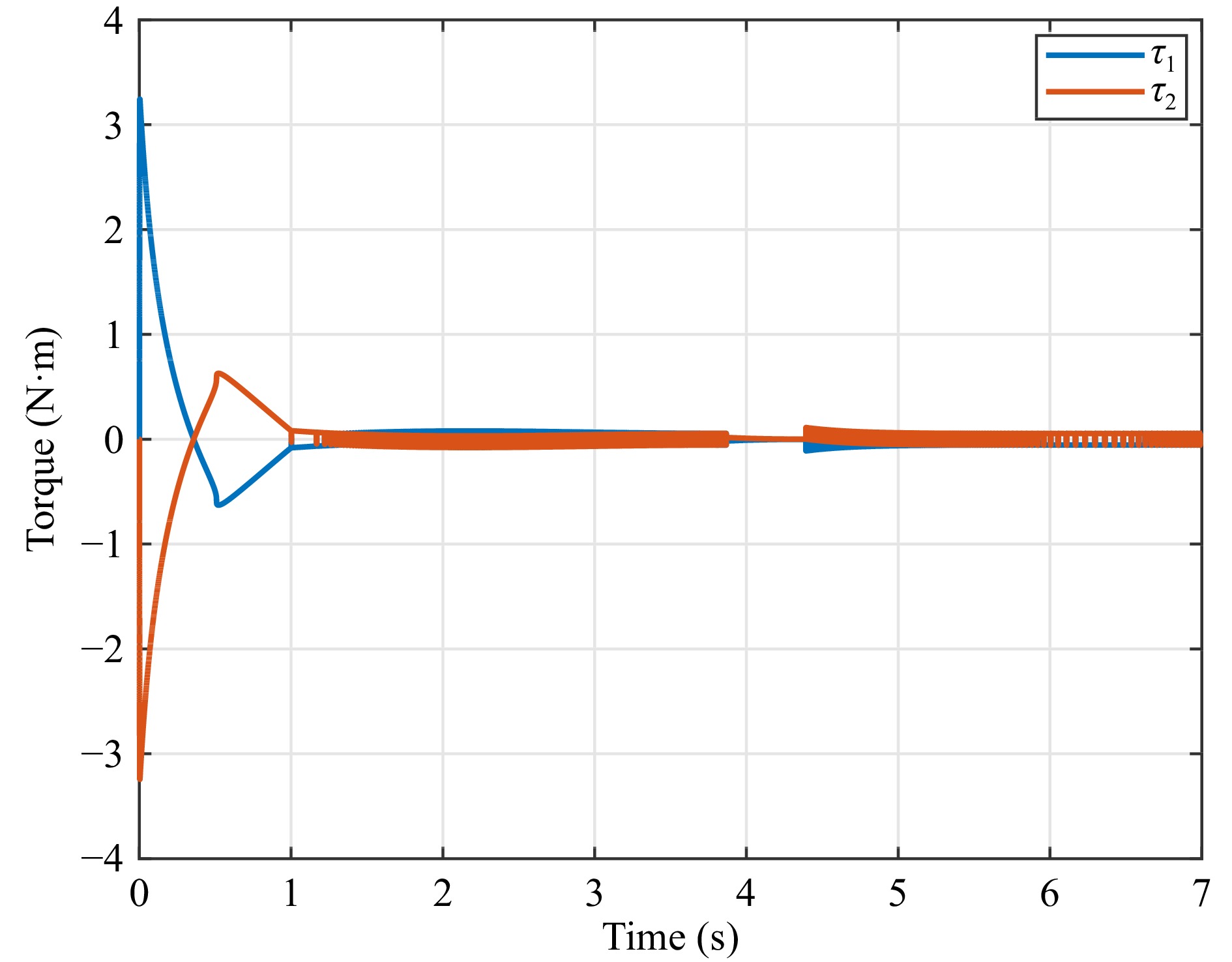
The issue of achieving prescribed-performance path following in robotics is addressed in this paper, where the aim is to ensure that a desired path within a specified region is accurately converged to by the controlled vehicle. In this context, a novel form of the prescribed performance guiding vector field is introduced, accompanied by a prescribed-time sliding mode control approach. Furthermore, the interdependence among the prescribed parameters is discussed. To validate the effectiveness of the proposed method, numerical simulations are presented to demonstrate the efficacy of the approach.

| [1] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [2] |
D. Lam, C. Manzie, M. Good, and R. Bitmead, “Receding horizon timeoptimal control for a class of differentially flat systems,” Systems and Control Letters, vol. 83, pp. 61–66, 2015.
|
| [3] |
Z. Zheng, J. Li, Z. Guan, and Z. Zuo, “Constrained moving path following control for UAV with robust control barrier function,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 7, pp. 1557–1570, 2023. doi: 10.1109/JAS.2023.123573
|
| [4] |
Y. Xiu, D. Li, M. Zhang, H. Deng, R. Law, Y. Huang, E. Q. Wu, and X. Xu, “Finite-time sideslip differentiator-based LOS guidance for robust path following of snake robots,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 239–253, 2023. doi: 10.1109/JAS.2022.106052
|
| [5] |
Y. Liang and Y. Jia, “Tangent vector field approach for curved path following with input saturation,” Systems and Control Letters, vol. 104, pp. 49–58, 2017.
|
| [6] |
W. Yao, H. Garcia de Marina, Z. Sun, and M. Cao, “Distributed coordinated path following using guiding vector fields,” in Proc. IEEE Int. Conf. Robotics and Autom., Xi’an, China, 2021, pp. 10030–10037.
|
| [7] |
W. Yao, H. G. de Marina, B. Lin, and M. Cao, “Singularity-free guiding vector field for robot navigation,” IEEE Trans. Robotics, pp. 1–16, 2021.
|
| [8] |
B. Ning, Q.-L. Han, Z. Zuo, L. Ding, Q. Lu, and X. Ge, “Fixedtime and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies,” IEEE Trans. Industrial Informatics, vol. 19, no. 2, pp. 1121–1135, 2023. doi: 10.1109/TII.2022.3201589
|
| [9] |
Y. Song, Y. Wang, J. Holloway, and M. Krstic, “Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time,” Automatica, vol. 83, pp. 243–251, 2017. doi: 10.1016/j.automatica.2017.06.008
|
| [10] |
J. Holloway and M. Krstic, “Prescribed-time observers for linear systems in observer canonical form,” IEEE Trans. Autom. Control, vol. 64, no. 9, pp. 3905–3912, 2019. doi: 10.1109/TAC.2018.2890751
|
| [11] |
A. K. Pal, S. Kamal, S. K. Nagar, B. Bandyopadhyay, and L. Fridman, “Design of controllers with arbitrary convergence time,” Automatica, vol. 112, p. 108710, 2020. doi: 10.1016/j.automatica.2019.108710
|
| [12] |
Y. Orlov, “Time space deformation approach to prescribed-time stabilization: Synergy of time-varying and non-lipschitz feedback designs,” Automatica, vol. 144, p. 110485, 2022. doi: 10.1016/j.automatica.2022.110485
|
| [13] |
K. Shao and J. Zheng, “Predefined-time sliding mode control with prescribed convergent region,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 934–936, 2022. doi: 10.1109/JAS.2022.105575
|
| [14] |
S. Shi, X. Wang, S. Li, and J. Yang, “Prescribed-time second-order sliding mode controller design subject to mismatched term,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 70, no. 6, pp. 1976–1980, 2023.
|
| [15] |
Z. Gao, Y. Zhang, and G. Guo, “Prescribed-time control of vehicular platoons based on a disturbance observer,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 69, no. 9, pp. 3789–3793, 2022.
|
| [16] |
Y. Chitour, R. Ushirobira, and H. Bouhemou, “Stabilization for a perturbed chain of integrators in prescribed time,” SIAM J. Control and Optimization, vol. 58, no. 2, pp. 1022–1048, 2020. doi: 10.1137/19M1285937
|
| [17] |
L. W. Tu, “Manifolds,” in An Introduction to Manifolds. Springer, 2011, pp. 339–343.
|
| [18] |
A. J. Munoz-Vazquez, J. D. Sánchez-Torres, E. Jimenez-Rodriguez, and A. G. Loukianov, “Predefined-time robust stabilization of robotic manipulators,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1033–1040, 2019. doi: 10.1109/TMECH.2019.2906289
|
| [19] |
Y. Song, Y. Wang, and M. Krstic, “Time-varying feedback for stabilization in prescribed finite time,” Int. J. Robust and Nonlinear Control, vol. 29, no. 3, pp. 618–633, 2019. doi: 10.1002/rnc.4084
|
| [20] |
Z. Zuo, J. Song, and Q.-L. Han, “Coordinated planar path-following control for multiple nonholonomic wheeled mobile robots,” IEEE Trans. Cybernetics, vol. 52, no. 9, pp. 9404–9413, 2022. doi: 10.1109/TCYB.2021.3057335
|
| [21] |
L. Lapierre, D. Soetanto, and A. Pascoal, “Adaptive vision-based path following control of a wheeledrobot,” in Proc. European Control Conf., Cambridge, UK, 2003, pp. 1851–1856.
|
Figures(11) / Tables(2)






 DownLoad:
DownLoad: