A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 6
Volume 11
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Tan, C. Hu, G. Cao, Q. Wei, W. Li, and B. Han, “Fixed-time antidisturbance consensus tracking for nonlinear multiagent systems with matching and mismatching disturbances,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 6, pp. 1410–1423, Jun. 2024. doi: 10.1109/JAS.2024.124461

|
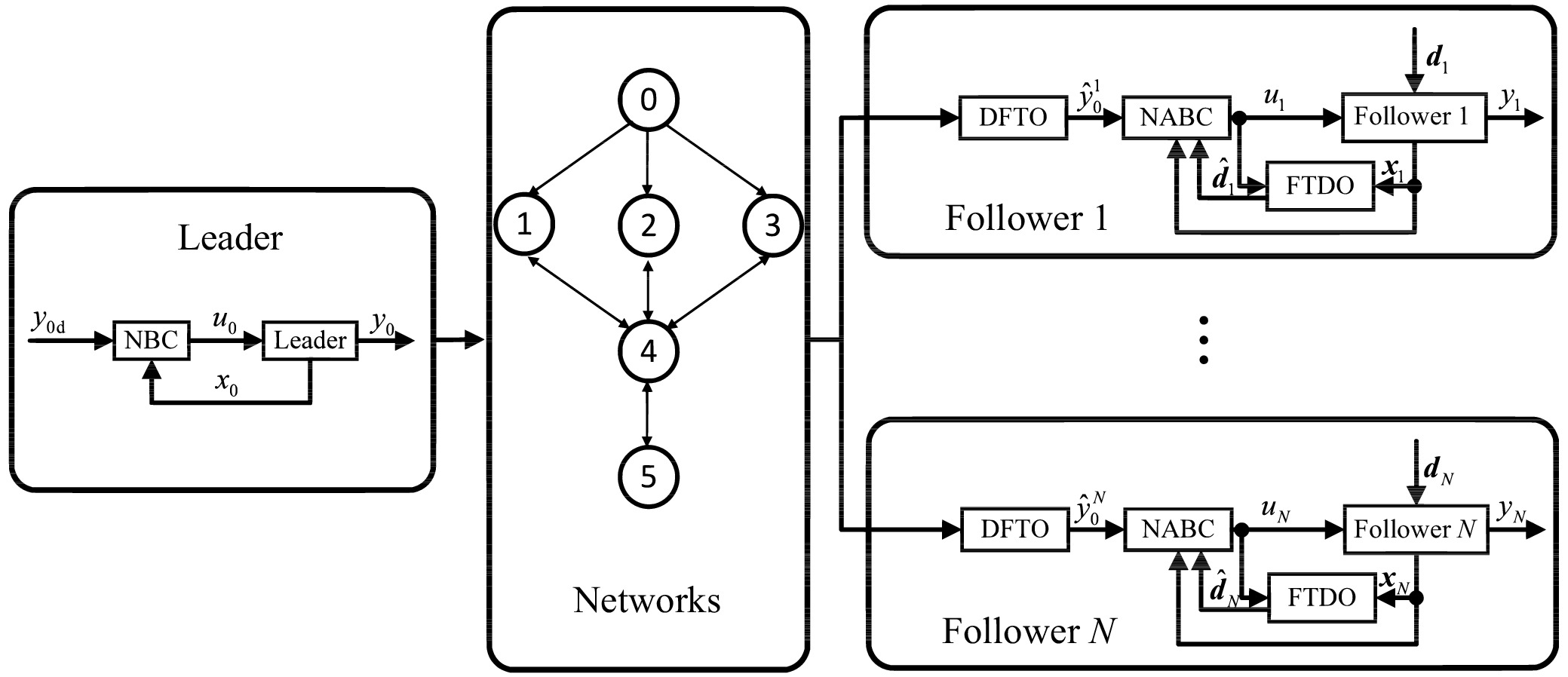
In this paper, fixed-time consensus tracking for multiagent systems (MASs) with dynamics in the form of strict feedback affine nonlinearity is addressed. A fixed-time antidisturbance consensus tracking protocol is proposed, which consists of a distributed fixed-time observer, a fixed-time disturbance observer, a nonsmooth antidisturbance backstepping controller, and the fixed-time stability analysis is conducted by using the Lyapunov theory correspondingly. This paper includes three main improvements. First, a distributed fixed-time observer is developed for each follower to obtain an estimate of the leader’s output by utilizing the topology of the communication network. Second, a fixed-time disturbance observer is given to estimate the lumped disturbances for feedforward compensation. Finally, a nonsmooth antidisturbance backstepping tracking controller with feedforward compensation for lumped disturbances is designed. In order to mitigate the “explosion of complexity” in the traditional backstepping approach, we have implemented a modified nonsmooth command filter to enhance the performance of the closed-loop system. The simulation results show that the proposed method is effective.

| [1] |
C. Zhang, L. Chang, and X. Zhang, “Leader-follower consensus of upper-triangular nonlinear multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 2, pp. 210–217, Apr. 2014. doi: 10.1109/JAS.2014.7004552
|
| [2] |
Q. Wei, X. Wang, X. Zhong, and N. Wu, “Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 423–431, Feb. 2021. doi: 10.1109/JAS.2021.1003838
|
| [3] |
P. Yu, K.-Z. Liu, X. Liu, X. Li, M. Wu, and J. She, “Robust consensus tracking control of uncertain multi-agent systems with local disturbance rejection,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 427–438, Feb. 2023. doi: 10.1109/JAS.2023.123231
|
| [4] |
M. S. Sarafraz and M. S. Tavazoei, “A unified optimization-based framework to adjust consensus convergence rate and optimize the network topology in uncertain multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 9, pp. 1539–1548, Sept. 2021. doi: 10.1109/JAS.2021.1004111
|
| [5] |
G. Difilippo, M. P. Fanti, and A. M. Mangini, “Maximizing convergence speed for second order consensus in leaderless multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 2, pp. 259–269, Feb. 2022. doi: 10.1109/JAS.2021.1004320
|
| [6] |
S. Zeng, T. T. Doan, and J. Romberg, “Finite-time convergence rates of decentralized stochastic approximation with applications in multi-agent and multi-task learning,” IEEE Trans. Autom. Control, vol. 68, no. 5, pp. 2758–2773, May 2023. doi: 10.1109/TAC.2022.3201034
|
| [7] |
W. Mi, L. Luo, and S. Zhong, “Fixed-time consensus tracking for multi-agent systems with a nonholomonic dynamics,” IEEE Trans. Autom. Control, vol. 68, no. 2, pp. 1161–1168, Feb. 2023. doi: 10.1109/TAC.2022.3148312
|
| [8] |
W. Wu and S. Tong, “Observer-based fixed-time adaptive fuzzy consensus DSC for nonlinear multiagent systems,” IEEE Trans. Cybern., vol. 53, no. 9, pp. 5881–5891, Sept. 2023. doi: 10.1109/TCYB.2022.3204806
|
| [9] |
H.-Q. Hou, Y.-J. Liu, J. Lan, and L. Liu, “Adaptive fuzzy fixed time time-varying formation control for heterogeneous multiagent systems with full state constraints,” IEEE Trans. Fuzzy Syst., vol. 31, no. 4, pp. 1152–1162, Apr. 2023. doi: 10.1109/TFUZZ.2022.3195609
|
| [10] |
W. Guo, L. Shi, W. Sun, and H. Jahanshahi, “Predefined-time average consensus control for heterogeneous nonlinear multi-agent systems,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 70, no. 8, pp. 2989–2993, Aug. 2023.
|
| [11] |
W. Ren and R. W. Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,” IEEE Trans. Autom. Control, vol. 50, no. 5, pp. 655–661, May 2005. doi: 10.1109/TAC.2005.846556
|
| [12] |
Z. Li, Z. Duan, G. Chen, and L. Huang, “Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint,” IEEE Trans. Circuits Syst. I: Regular Papers, vol. 57, no. 1, pp. 213–224, Jan. 2010. doi: 10.1109/TCSI.2009.2023937
|
| [13] |
W. Yu, G. Chen, and M. Cao, “Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems,” Automatica, vol. 46, no. 6, pp. 1089–1095, Jun. 2010. doi: 10.1016/j.automatica.2010.03.006
|
| [14] |
Z. Ding, “Consensus disturbance rejection with disturbance observers,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5829–5837, Sept. 2015. doi: 10.1109/TIE.2015.2442218
|
| [15] |
R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, Sept. 2004. doi: 10.1109/TAC.2004.834113
|
| [16] |
Y. Kim and M. Mesbahi, “On maximizing the second smallest eigenvalue of a state-dependent graph laplacian,” IEEE Trans. Autom. Control, vol. 51, no. 1, pp. 116–120, Jan. 2006. doi: 10.1109/TAC.2005.861710
|
| [17] |
Z. Zuo, Q.-L. Han, B. Ning, X. Ge, and X.-M. Zhang, “An overview of recent advances in fixed-time cooperative control of multiagent systems,” IEEE Trans. Ind. Inf., vol. 14, no. 6, pp. 2322–2334, Jun. 2018. doi: 10.1109/TII.2018.2817248
|
| [18] |
J. Sun, H. He, J. Yi, and Z. Pu, “Finite-time command-filtered composite adaptive neural control of uncertain nonlinear systems,” IEEE Trans Cybernetics, vol. 52, no. 7, pp. 6809–6821, Jul. 2022.
|
| [19] |
Y. Zhao, Z. Duan, G. Wen, and G. Chen, “Distributed finite-time tracking of multiple non-identical second-order nonlinear systems with settling time estimation,” Automatica, vol. 64, pp. 86–93, Feb. 2016. doi: 10.1016/j.automatica.2015.11.005
|
| [20] |
J. Cortés, “Finite-time convergent gradient flows with applications to network consensus,” Automatica, vol. 42, no. 11, pp. 1993–2000, Nov. 2006. doi: 10.1016/j.automatica.2006.06.015
|
| [21] |
L. Wang and F. Xiao, “Finite-time consensus problems for networks of dynamic agents,” IEEE Trans. Autom. Control, vol. 55, no. 4, pp. 950–955, Apr. 2010. doi: 10.1109/TAC.2010.2041610
|
| [22] |
Y. Cao and W. Ren, “Finite-time consensus for multi-agent networks with unknown inherent nonlinear dynamics,” Automatica, vol. 50, no. 10, pp. 2648–2656, Oct. 2014. doi: 10.1016/j.automatica.2014.08.028
|
| [23] |
H. Du, S. Li, and C. Qian, “Finite-time attitude tracking control of spacecraft with application to attitude synchronization,” IEEE Trans. Autom. Control, vol. 56, no. 11, pp. 2711–2717, Nov. 2011. doi: 10.1109/TAC.2011.2159419
|
| [24] |
J. Zhou, Q. Hu, and M. I. Friswell, “Decentralized finite time attitude synchronization control of satellite formation flying,” J. Guid. Control Dyn., vol. 36, no. 1, pp. 185–195, Jan. 2013. doi: 10.2514/1.56740
|
| [25] |
S. Khoo, L. Xie, and Z. Man, “Robust finite-time consensus tracking algorithm for multirobot systems,” IEEE/ASME Trans. Mechatron., vol. 14, no. 2, pp. 219–228, Apr. 2009. doi: 10.1109/TMECH.2009.2014057
|
| [26] |
X. Wang and Y. Hong, “Finite-time consensus for multi-agent networks with second-order agent dynamics,” IFAC Proc. Vol., vol. 41, no. 2, pp. 15185–15190, 2008. doi: 10.3182/20080706-5-KR-1001.02568
|
| [27] |
Z.-H. Guan, F.-L. Sun, Y.-W. Wang, and T. Li, “Finite-time consensus for leader-following second-order multi-agent networks,” IEEE Trans. Circuits Syst. I: Regular Papers, vol. 59, no. 11, pp. 2646–2654, Nov. 2012. doi: 10.1109/TCSI.2012.2190676
|
| [28] |
Z. Meng, W. Ren, and Z. You, “Distributed finite-time attitude containment control for multiple rigid bodies,” Automatica, vol. 46, no. 12, pp. 2092–2099, Dec. 2010. doi: 10.1016/j.automatica.2010.09.005
|
| [29] |
V. Andrieu, L. Praly, and A. Astolfi, “Homogeneous approximation, recursive observer design, and output feedback,” SIAM J. Control Optim., vol. 47, no. 4, pp. 1814–1850, Jan. 2008. doi: 10.1137/060675861
|
| [30] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, Aug. 2012. doi: 10.1109/TAC.2011.2179869
|
| [31] |
S. E. Parsegov, A. E. Polyakov, and P. S. Shcherbakov, “Fixed-time consensus algorithm for multi-agent systems with integrator dynamics,” IFAC Proc. Vol., vol. 46, no. 27, pp. 110–115, 2013. doi: 10.3182/20130925-2-DE-4044.00055
|
| [32] |
Z. Zuo and L. Tie, “A new class of finite-time nonlinear consensus protocols for multi-agent systems,” Int. J. Control, vol. 87, no. 2, pp. 363–370, Feb. 2014. doi: 10.1080/00207179.2013.834484
|
| [33] |
Z. Zuo and L. Tie, “Distributed robust finite-time nonlinear consensus protocols for multi-agent systems,” Int. J. Syst. Sci., vol. 47, no. 6, pp. 1366–1375, Apr. 2016. doi: 10.1080/00207721.2014.925608
|
| [34] |
Z. Zuo, “Nonsingular fixed-time consensus tracking for second-order multi-agent networks,” Automatica, vol. 54, pp. 305–309, Apr. 2015. doi: 10.1016/j.automatica.2015.01.021
|
| [35] |
J. Fu and J. Wang, “Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties,” Syst. Control Lett., vol. 93, pp. 1–12, Jul. 2016. doi: 10.1016/j.sysconle.2016.03.006
|
| [36] |
N. Huang, D. Liu, Z. Sun, Z. Duan, Q. Lu, and Z. Chen, “Distributed consensus seeking with different convergence performance requirements: A unified control framework,” IEEE Trans. Cybern., vol. 53, no. 9, pp. 5483–5496, Sept. 2023. doi: 10.1109/TCYB.2022.3155734
|
| [37] |
A. F. Filippov, Differential Equations With Discontinuous Righthand Side. Dordrecht, Netherlands: Springer, 1988.
|
| [38] |
S. P. Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems,” SIAM J. Control Optim., vol. 38, no. 3, pp. 751–766, Jan. 2000. doi: 10.1137/S0363012997321358
|
| [39] |
J. D. Sánchez-Torres and A. G. Loukianov, “A fixed-time second order sliding mode observer for a class of nonlinear systems,” in Proc. 13th Int. Workshop Variable Structure Systems, Nantes, France, 2014, pp. 1–4.
|
| [40] |
C. Qian and W. Lin, “A continuous feedback approach to global strong stabilization of nonlinear systems,” IEEE Trans. Autom. Control, vol. 46, no. 7, pp. 1061–1079, Jul. 2001. doi: 10.1109/9.935058
|
| [41] |
Z. Zuo, B. Tian, M. Defoort, and Z. Ding, “Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics,” IEEE Trans. Autom. Control, vol. 63, no. 2, pp. 563–570, Feb. 2018. doi: 10.1109/TAC.2017.2729502
|
| [42] |
X. Wei, W. Yu, H. Wang, Y. Yao, and F. Mei, “An observer-based fixed-time consensus control for second-order multi-agent systems with disturbances,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 66, no. 2, pp. 247–251, Feb. 2019.
|
| [43] |
M. Basin, P. Yu, and Y. Shtessel, “Finite- and fixed-time differentiators utilising HOSM techniques,” IET Control Theory Appl., vol. 11, no. 8, pp. 1144–1152, May 2017. doi: 10.1049/iet-cta.2016.1256
|
Figures(10) / Tables(1)






 DownLoad:
DownLoad: