2018, 5(5): 885-901.
doi: 10.1109/JAS.2018.7511123
Abstract:
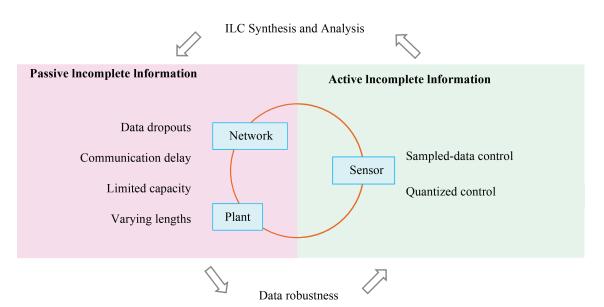
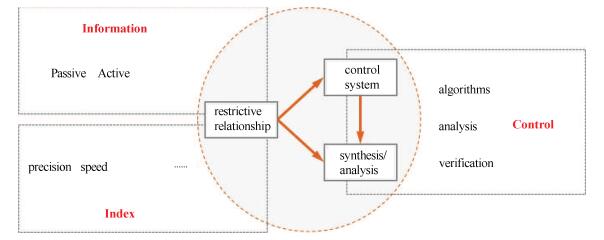
This paper conducts a survey on iterative learning control (ILC) with incomplete information and associated control system design, which is a frontier of the ILC field. The incomplete information, including passive and active types, can cause data loss or fragment due to various factors. Passive incomplete information refers to incomplete data and information caused by practical system limitations during data collection, storage, transmission, and processing, such as data dropouts, delays, disordering, and limited transmission bandwidth. Active incomplete information refers to incomplete data and information caused by man-made reduction of data quantity and quality on the premise that the given objective is satisfied, such as sampling and quantization. This survey emphasizes two aspects: the first one is how to guarantee good learning performance and tracking performance with passive incomplete data, and the second is how to balance the control performance index and data demand by active means. The promising research directions along this topic are also addressed, where data robustness is highly emphasized. This survey is expected to improve understanding of the restrictive relationship and trade-off between incomplete data and tracking performance, quantitatively, and promote further developments of ILC theory.
Dong Shen, "Iterative Learning Control With Incomplete Information: A Survey," IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 885-901, Sept. 2018. doi: 10.1109/JAS.2018.7511123.














































 E-mail Alert
E-mail Alert