A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 4
Issue 4
Volume 4
Issue 4
IEEE/CAA Journal of Automatica Sinica
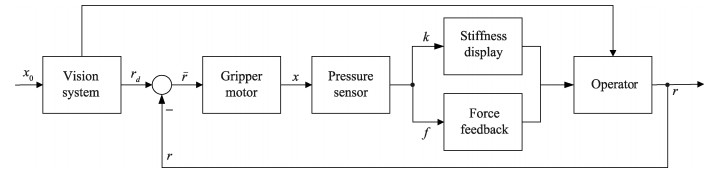
| Citation: | Pengwen Xiong, Xiaodong Zhu, Aiguo Song, Lingyan Hu, Xiaoping P. Liu and Lihang Feng, "A Target Grabbing Strategy for Telerobot Based on Improved Stiffness Display Device," IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 661-667, Oct. 2017. doi: 10.1109/JAS.2016.7510256

|

| [1] |
P. Dario, B. Hannaford, and A. Menciassi, "Smart surgical tools and augmenting devices, " IEEE Trans. Rob. Automat. , vol. 19, no. 5, pp. 782-792, Oct. 2003. http: //ieeexplore. ieee. org/xpls/icp. jsp?arnumber=1236751
|
| [2] |
H. J. Li and A. G. Song, "Virtual-environment modeling and correction for force-reflecting teleoperation with time delay, " IEEE Trans. Ind. Electron. , vol. 54, no. 2, pp. 1227-1233, Apr. 2007. http: //ieeexplore. ieee. org/document/4140627/
|
| [3] |
W. Qin, Z. X. Liu, and Z. Q. Chen, " Formation control for nonlinear multi-agent systems with linear extended state observer, " IEEE/CAA J. Automat. Sin. , vol. 1, no. 2, pp. 171-179, Apr. 2014. http: //ieeexplore. ieee. org/document/7004547/
|
| [4] |
Y. N. Yang, C. C. Hua, and X. P. Guan, "Finite time control design for bilateral teleoperation system with position synchronization error constrained, " IEEE Trans. Cybern. , vol. 46, no. 3, pp. 609-619, Mar. 2015. http: //www. ncbi. nlm. nih. gov/pubmed/25823053
|
| [5] |
C. C. Hua, Y. N. Yang, and P. X. Liu, "Output-Feedback adaptive control of networked teleoperation system with time-varying delay and bounded inputs, " IEEE/ASME Trans. Mechatron. , vol. 20, no. 5, pp. 2009-2020, Oct. 2015. http: //ieeexplore. ieee. org/document/6923461/
|
| [6] |
Y. N. Yang, C. C. Hua, and X. P. Guan, "Adaptive fuzzy finite-time coordination control for networked nonlinear bilateral teleoperation system, " IEEE Trans. Fuzzy Syst. , vol. 22, no. 3, pp. 631-641, Jun. 2014. http: //ieeexplore. ieee. org/document/6542671/
|
| [7] |
Y. N. Yang, C. C. Hua, and X. P. Guan, "Finite-time synchronization control for bilateral teleoperation under communication delays, " Robot. Comput. Integr. Manuf. , vol. 31, pp. 61-69, Feb. 2015. http: //ieeexplore. ieee. org/document/5196767/
|
| [8] |
L. Z. Pan, A. G. Song, G. Z. Xu, H. J. Li, H. Zeng, and B. G. Xu, "Safety supervisory strategy for an upper-limb rehabilitation robot based on impedance control, " Int. J. Adv. Rob. Syst. , vol. 10, no. 2, pp. 127, Feb. 2013. doi: 10. 5772/55094
|
| [9] |
A. Bicchi, E. P. Scilingo, and D. De Rossi, "Haptic discrimination of softness in teleoperation: The role of the contact area spread rate, " IEEE Trans. Rob. Automat. , vol. 16, no. 5, pp. 496-504, Oct. 2000. http: //ieeexplore. ieee. org/xpls/abs_all. jsp?arnumber=880800
|
| [10] |
S. Aiguo, L. Jia, and W. Juan, "Softness haptic display device for human-computer interaction, " Int. J. Adv. Rob. Syst. , vol. 5, pp. 257-278, 2008. doi: 10. 5772/6299
|
| [11] |
X. Wang, N. D. Georganas, and E. M. Petriu, "Fabric texture analysis using computer vision techniques, " IEEE Trans. Instrum. Meas. , vol. 60, no. 1, pp. 44-56, Jan. 2011. http: //ieeexplore. ieee. org/document/5565463/
|
| [12] |
D. Copeland and J. Finlay, "Identification of the optimum resolution specification for a haptic graphic display, " Interact. Comput. , vol. 22, no. 2, pp. 98-106, Mar. 2010. http: //dl. acm. org/citation. cfm?id=1747021
|
| [13] |
J. Wu, L. Y. Li, R. Q. Yan, D. J. Ni, and W. Liu, "Experimental study on virtual texture force perception using the JND method, " Int. J. Adv. Rob. Syst. , vol. 9, pp. 63, Jun. 2012. doi: 10. 5772/50533
|
| [14] |
A. Oonsivilai and N. Meeboon, "Silk texture defect recognition system using computer vision and artificial neural networks, " in Proc. 2nd International Congress on Image and Signal Processing, Tianjin, China, 2009, 1-4. http: //ieeexplore. ieee. org/xpl/abstractAuthors. jsp?reload=true & arnumber=5303972
|
| [15] |
H. Fujimoto, L. C. Zhu, and K. Abdel-Malek, "Image-based visual servoing for grasping unknown objects, " in Proc. 26th Annu. Confjerence of the IEEE Industrial Electronics Society, Nagoya, Japan, vol. 2, pp. 876-881, 2000. http: //ieeexplore. ieee. org/xpls/abs_all. jsp?arnumber=972238
|
| [16] |
M. Trabelsi, N. Aitoufroukh, and S. Lelandais, "Improvements of object grabbing method by using color images and neural networks classification, " in Proc. 32nd Conf. IEEE Industrial Electronics, Paris, France, 2006, pp. 3922-3927. http: //ieeexplore. ieee. org/xpls/icp. jsp?arnumber=4153469
|
| [17] |
L. Bodenhagen, D. Kraft, and P. E. Hotz, "Learning to grasp unknown objects based on 3D edge information, " in Proc. 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Daejeon, Korea, 2009, pp. 421-428. http: //ieeexplore. ieee. org/xpls/icp. jsp?arnumber=5423169
|
| [18] |
S. P. DiMaio and S. E. Salcudean, "Needle insertion modeling and simulation, " IEEE Trans. Rob. Autom. , vol. 19, no. 5, pp. 864-875, Oct. 2003. http: //ieeexplore. ieee. org/xpls/icp. jsp?arnumber=1236759
|
| [19] |
T. H. Massie and J. K. Salisbury, "The PHANToM haptic interface: A device for probing virtual objects, " in Proc. ASME Winter Annu. Meeting: Dyn. Syst. and Contr. , vol. 55, pp. 295-300, 1994. http: //ci. nii. ac. jp/naid/10012640353
|
| [20] |
G. C. Burdea, "Haptics issues in virtual environments, " in Proc. Computer Graphics International, Geneva, Switzerland, 2000, pp. 295-302. http: //dl. acm. org/citation. cfm?id=793058
|
| [21] |
Y. Guo, A. G. Song, J. T. Bao, H. R. Tang, and J. W. Cui, "A combination of terrain prediction and correction for search and rescue robot autonomous navigation, " Int. J. Adv. Rob. Syst. , vol. 6, no. 3, pp. 207-214, Sep. 2009. http: //www. oalib. com/paper/2577101
|
| [22] |
C. W. Hsu and C. J. Lin, "A comparison of methods for multiclass support vector machines, " IEEE Trans. Neural Netw. , vol. 13, no. 2, pp. 415-425, Mar. 2002. http: //www. ncbi. nlm. nih. gov/pubmed?cmd=Retrieve & list_uids=18244442 & dopt=Abstract
|
| [23] |
K. Englehart, B. Hudgin, and P. A. Parker, "A wavelet-based continuous classification scheme for multifunction myoelectric control, " IEEE Trans. Biomed. Eng. , vol. 48, no. 3, pp. 302-311, Mar. 2001. http: //www. ncbi. nlm. nih. gov/pubmed/11327498
|
| [24] |
C. J. C. Burges, "A tutorial on support vector machines for pattern recognition, " Data Min. Knowl. Discov. , vol. 2, no. 2, pp. 121-167, Jun. 1998. http: //dl. acm. org/citation. cfm?id=593463 & CFID=448038169 & CFTOKEN=58479656
|
| [25] |
M. A. Hearst, S. T. Dumais, E. Osuna, J. Platt, and B. Scholkopf, "Support vector machines, " IEEE Intell. Syst. Their Appl. , vol. 13, no. 4, pp. 18-21, Jul. -Aug. 1998. http: //ieeexplore. ieee. org/xpls/abs_all. jsp?arnumber=708428
|
| [26] |
O. Chapelle, V. Vapnik, O. Bousquet, and S. Mukherjee, "Choosing multiple parameters for support vector machines, " Mach. Learn. , vol. 46, no. 1-3, pp. 131-159, Jan. 2002. doi: 10. 1023/A%3A1012450327387
|
| [27] |
C. Huang, L. S. Davis, and J. R. G. Townshend, "An assessment of support vector machines for land cover classification, " Int. J. Remote Sens. , vol. 23, no. 4, pp. 725-749, Feb. 2002. http: //ci. nii. ac. jp/naid/80015545139
|
| [28] |
C. H. Q. Ding and I. Dubchak, "Multi-class protein fold recognition using support vector machines and neural networks, " Bioinformatics, vol. 17, no. 4, pp. 349-358, Apr. 2001. http: //www. ncbi. nlm. nih. gov/pubmed/11301304
|
| [29] |
G. M. Foody and A. Mathur, "A relative evaluation of multiclass image classification by support vector machines, " IEEE Trans. Geosci. Remote Sens. , vol. 42, no. 6, pp. 1335-1343, Jun. 2004. http: //ieeexplore. ieee. org/xpls/icp. jsp?arnumber=1304900
|
Figures(11)






 DownLoad:
DownLoad: