A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
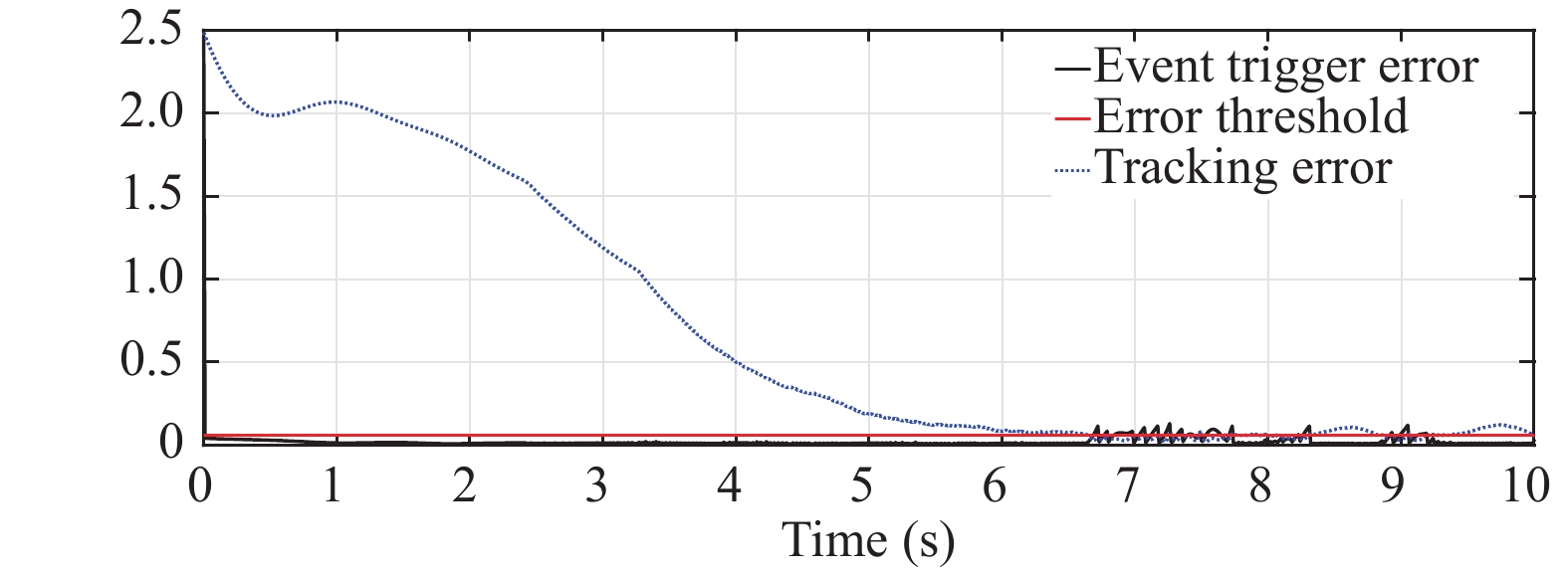
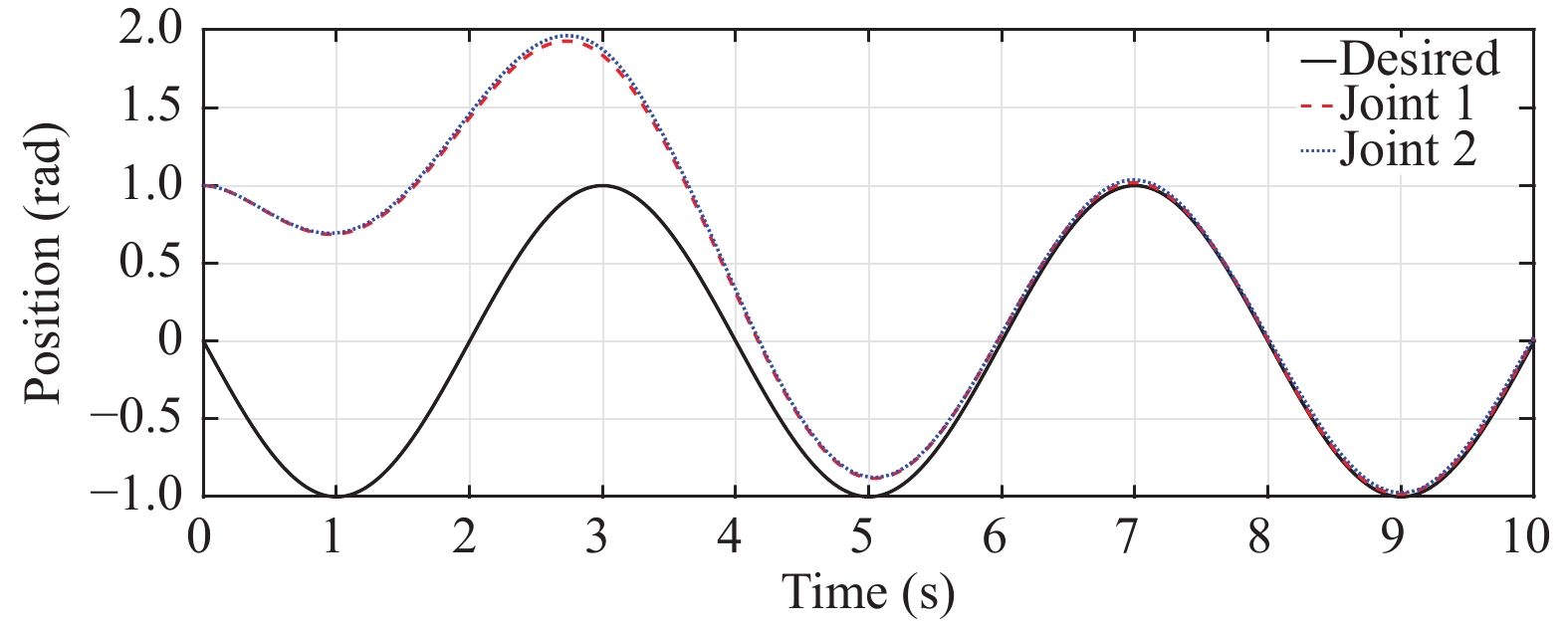
| Citation: | Aquib Mustafa, Narendra K. Dhar and Nishchal K Verma, "Event-Triggered Sliding Mode Control for Trajectory Tracking of Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 307-314, Jan. 2020. doi: 10.1109/JAS.2019.1911654

|

| [1] |
K. E. Arzen, " A simple event-based PID controller”, in Proc. IFAC 14th World Congr., China, pp. 423–428, 1999.
|
| [2] |
K. J. Astrom and B. M. Bernhardsson, " Comparison of Riemann and Lebesgue sampling for first order stochastic systems”, in Proc. IEEE Conf. Dec. and Control, USA, pp. 2011–2016, 2002.
|
| [3] |
P. Tabuada, " Event-triggered real-time scheduling of stabilizing control tasks,” IEEE Trans. Autom. Control, vol. 52, no. 9, pp. 1680–1685, 2007. doi: 10.1109/TAC.2007.904277
|
| [4] |
W. Heemels, J. Sandee, and P. Van Den Bosch, " Analysis of event driven controllers for linear systems,” Int. J. Control, vol. 81, no. 4, pp. 571–590, 2008. doi: 10.1080/00207170701506919
|
| [5] |
J. Lunze and D. Lehmann, " A state-feedback approach to event-based control,” Automatica, vol. 46, no. 1, pp. 211–215, 2010. doi: 10.1016/j.automatica.2009.10.035
|
| [6] |
M. Donkers and W. Heemels, " Output-based event-triggered control with guaranteed L1-gain and improved event-triggering”, in Proc. IEEE Conf. Dec. and Control, USA, pp. 3246–3251, 2010.
|
| [7] |
A. Girard, " Dynamic triggering mechanisms for event-triggered control,” IEEE Trans. Autom. Control, vol. 607, no. 7, pp. 1992–1997, Jul. 2015.
|
| [8] |
X. F. Wang and M. D. Lemmon., " Event-triggering in distributed networked control systems,” IEEE Trans. Autom. Control, vol. 56, no. 3, pp. 586–601, 2011. doi: 10.1109/TAC.2010.2057951
|
| [9] |
M. Mazo and P. Tabuada, " Decentralized event-triggered control over wireless sensor/actuator networks,” IEEE Trans. Autom. Control, vol. 56, no. 10, pp. 2456–2461, 2011. doi: 10.1109/TAC.2011.2164036
|
| [10] |
N. Mu, X. Liao, and T. Huang, " Event-based consensus control for a linear directed multiagent system with time delay,” IEEE Trans. Circuits Syst., vol. 62, no. 3, pp. 281–185, 2015. doi: 10.1109/TCSII.2014.2368991
|
| [11] |
N. K. Dhar, N. K. Verma, and L. Behera, " Adaptive critic based eventtriggered control for HVAC system,” IEEE Trans. Ind. Informat., vol. 14, no. 1, pp. 178–188, 2018. doi: 10.1109/TII.2017.2725899
|
| [12] |
A. Behera and B. Bandyopadhyay, " Robust sliding mode control: an event-triggering approach,” IEEE Trans. Circuits Syst., vol. 64, no. 2, pp. 146–150, 2017. doi: 10.1109/TCSII.2016.2551542
|
| [13] |
A. K. Behera and B. Bandyopadhyay, " Self-triggering based sliding mode control for linear systems,” IET Control Theory Appl., vol. 9, no. 17, pp. 2541–2547, 2015. doi: 10.1049/iet-cta.2015.0342
|
| [14] |
P. Postoyan and P. Tabuada, " A framework for the event-triggered stabilization of nonlinear systems,” IEEE Trans. Autom. Control, vol. 60, no. 4, pp. 982–996, 2015. doi: 10.1109/TAC.2014.2363603
|
| [15] |
P. Tallapragada and N. Chopra, " On event triggered tracking for nonlinear systems,” IEEE Trans. Autom. Control, vol. 58, no. 9, pp. 2343–2348, 2013. doi: 10.1109/TAC.2013.2251794
|
| [16] |
P. Tallapragada and N. Chopra, " On event triggered trajectory tracking for control affine nonlinear systems”, in Proc. 50th IEEE Dec. Control and Euro. Control Conf., USA, pp. 5377–5382, 2011.
|
| [17] |
V. I. Utkin, " Variable structure systems with sliding modes,” IEEE Trans. Autom. Control, vol. 22, no. 2, pp. 212–222, Apr. 1977. doi: 10.1109/TAC.1977.1101446
|
| [18] |
N. K. Verma, N. K. Dhar, A. K. Kar, R. Dev, S. S. F. Nawaz, and A. Salour, " Internet of things based framework for trajectory tracking control”, in Proc. IEEE World Forum on Int. of Things, USA, pp. 265–270, 2016.
|
| [19] |
A. Mustafa, N. K. Dhar, P. Agrawal, and N. K. Verma, " Adaptive backstepping sliding Mode control based on nonlinear disturbance observer for trajectory tracking of robotic manipulator”, in Proc. IEEE Int. Conf. Control and Robotics Eng., Thailand, pp. 29–34, 2017.
|
| [20] |
W. Gao, Y. Wang, and A. Homaifa, " Discrete-time variable structure control systems,” IEEE Trans. Ind. Electron., vol. 42, no. 2, pp. 177–122, 1995.
|
| [21] |
H. Li, P. Shi, and D. Yao, " Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 1933–1939, 2017. doi: 10.1109/TAC.2016.2588885
|
| [22] |
A. K. Behera and B. Bandyopadhyay, " Event based robust stabilization of linear systems”, in Proc. Annual IEEE Conf. Ind. Electron. Society, USA, pp. 133–138, 2014.
|
| [23] |
A. Ferrara and M. Cucuzzella, " Event-triggered sliding mode control strategies for a class of nonlinear uncertain systems”, Clempner J., Yu W. (eds) New Perspectives and Applications of Modern Control Theory. Springer, Chapter 16, pp. 397–425, 2018.
|
| [24] |
J. J. Craig, Introduction to Robotics: Mechanics and Control, AddisonWesley Longman, 1989.
|
| [25] |
M. W. Spong and M. Vidyasagar, Robot Dynamics and Control, John Wiley and Sons, 2008.
|
| [26] |
A. D. Luca, " Zero dynamics in robotic systems, ” Nonlinear Synthesis: Progress in Systems and Control Theory, vol 9, pp. 68–87, 1991.
|
| [27] |
H. Khalil, Nonlinear Systems, Prentice Hall, 2002.
|
| [28] |
Z. Qu, " Input-output robust tracking control design for flexible joint robots,” IEEE Trans. Automatic Control, vol. 40, no. 1, pp. 78–83, 1995. doi: 10.1109/9.362898
|
| [29] |
M. Cucuzzella and A. Ferrara, " Practical second order sliding modes in single-loop networked control of nonlinear systems,” Automatica, vol. 89, pp. 235–240, Mar. 2018.
|
Figures(13) / Tables(1)







 DownLoad:
DownLoad: