A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 6
Issue 5
Volume 6
Issue 5
IEEE/CAA Journal of Automatica Sinica
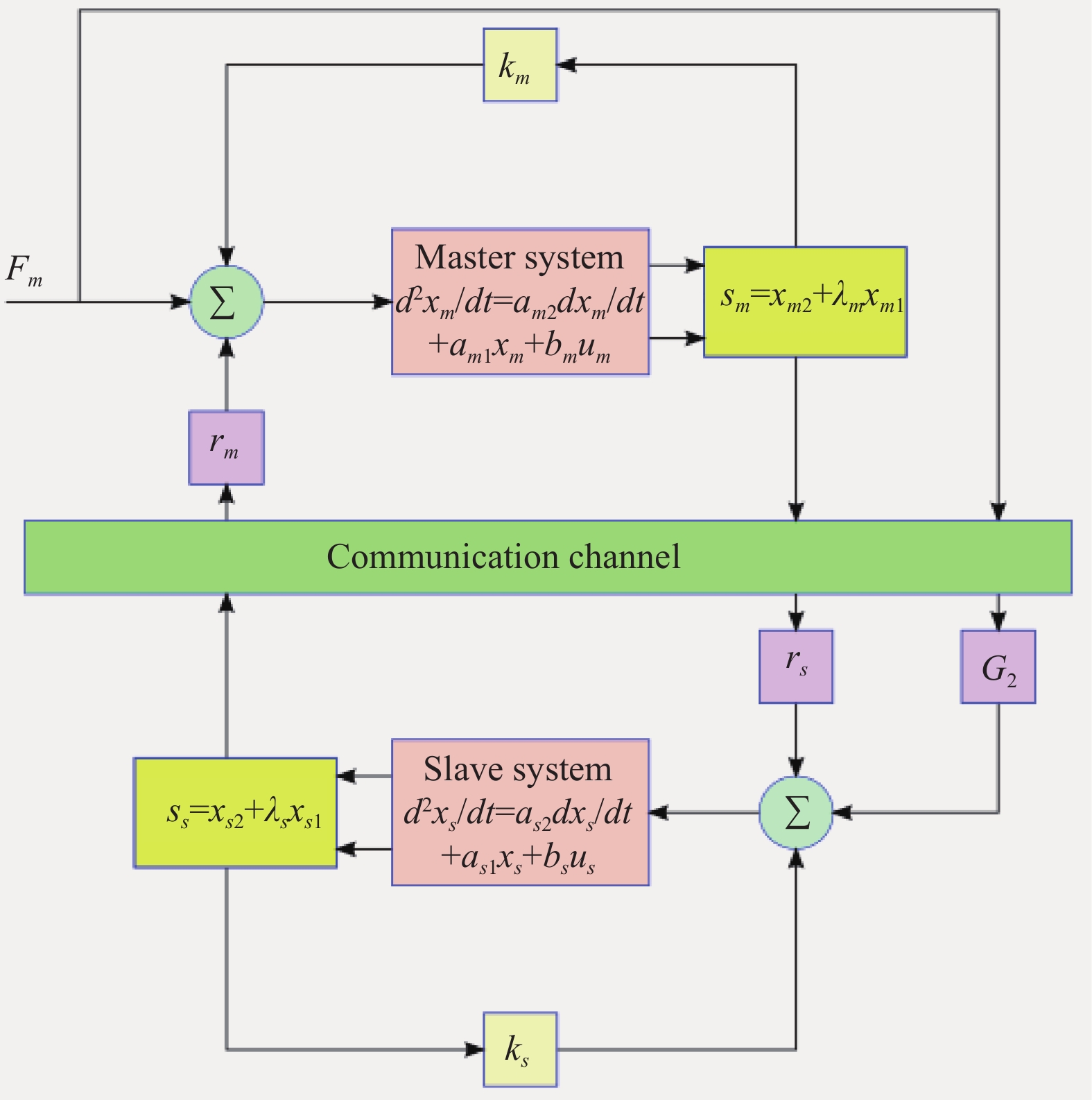
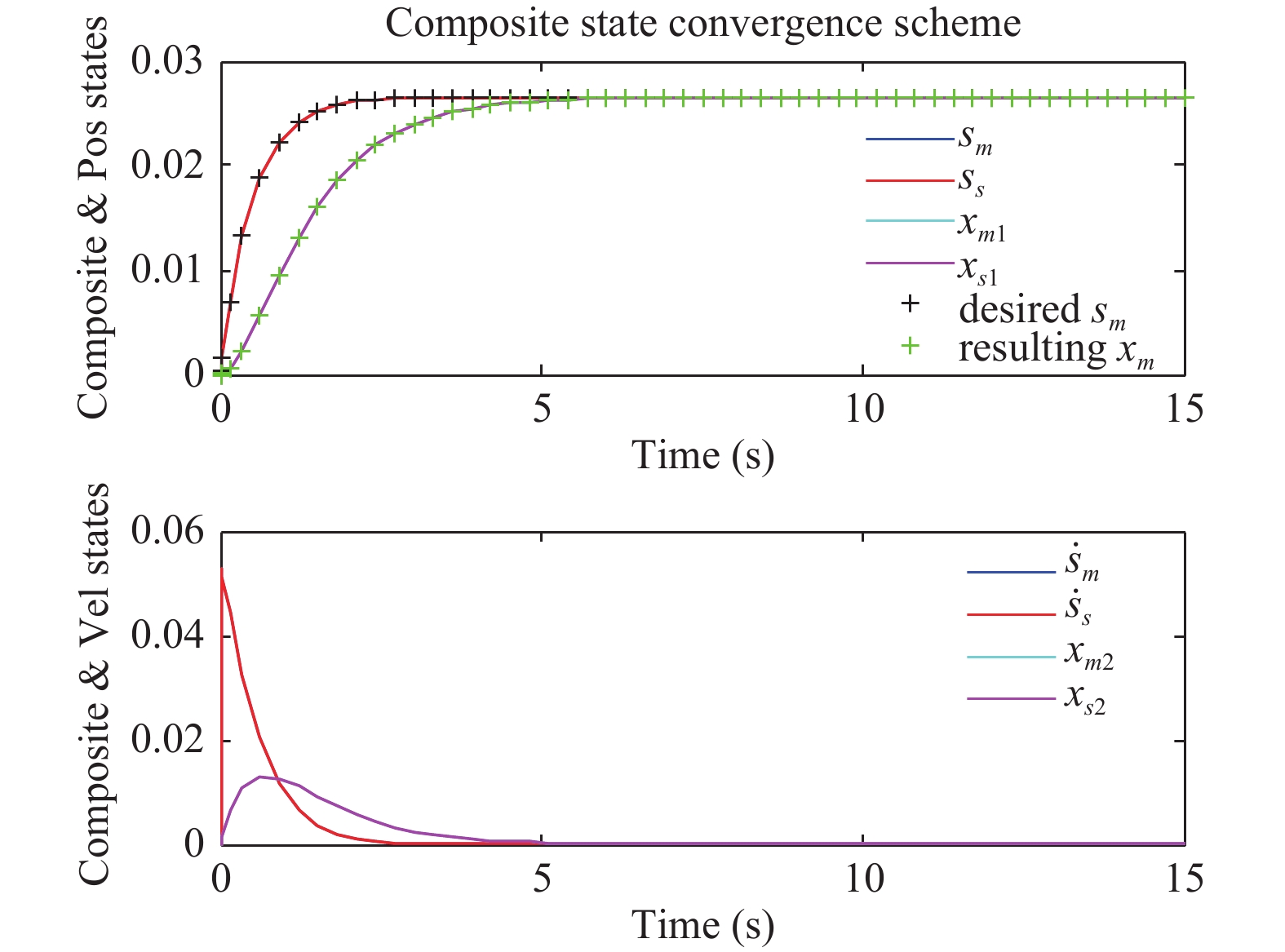
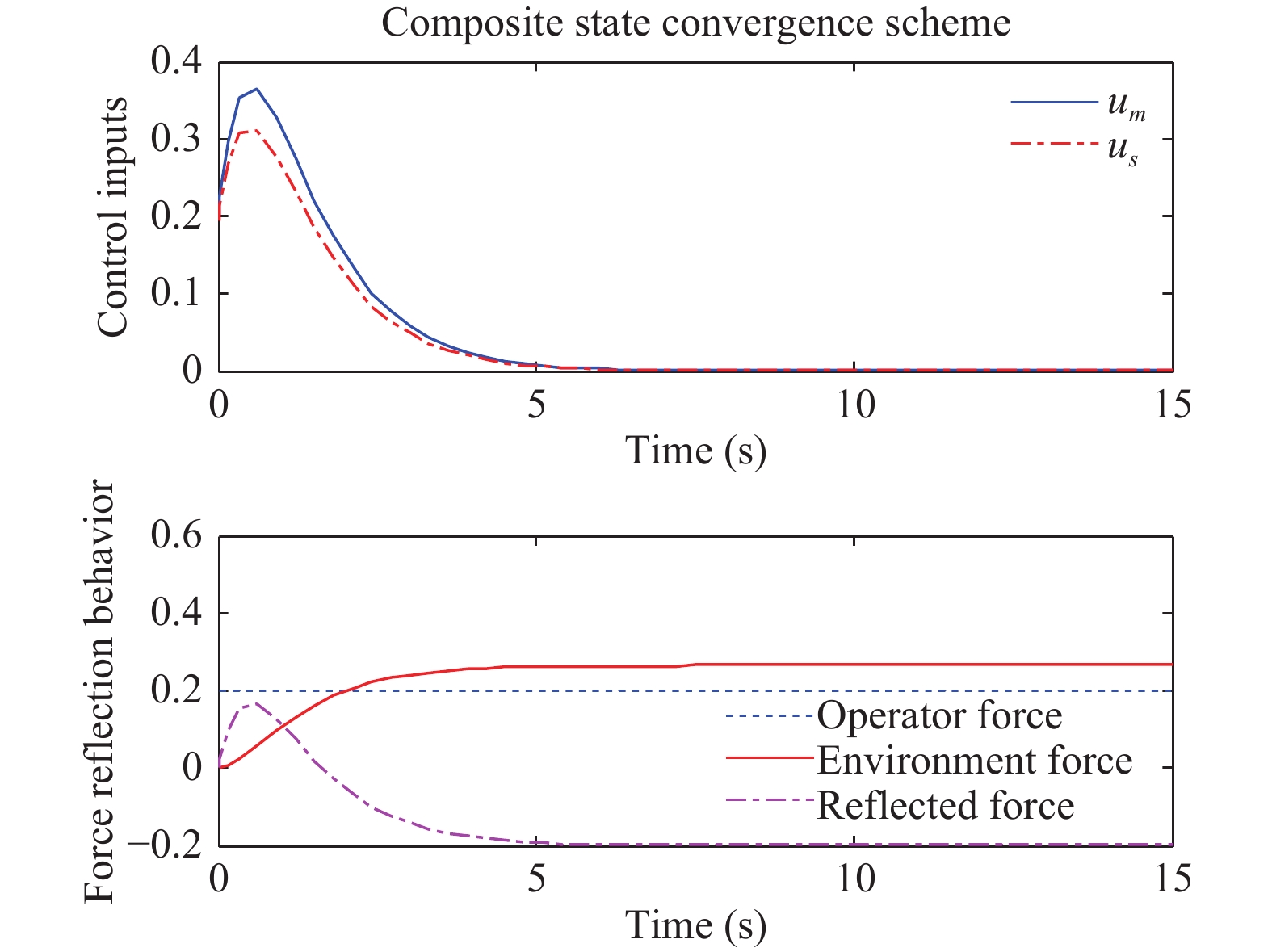
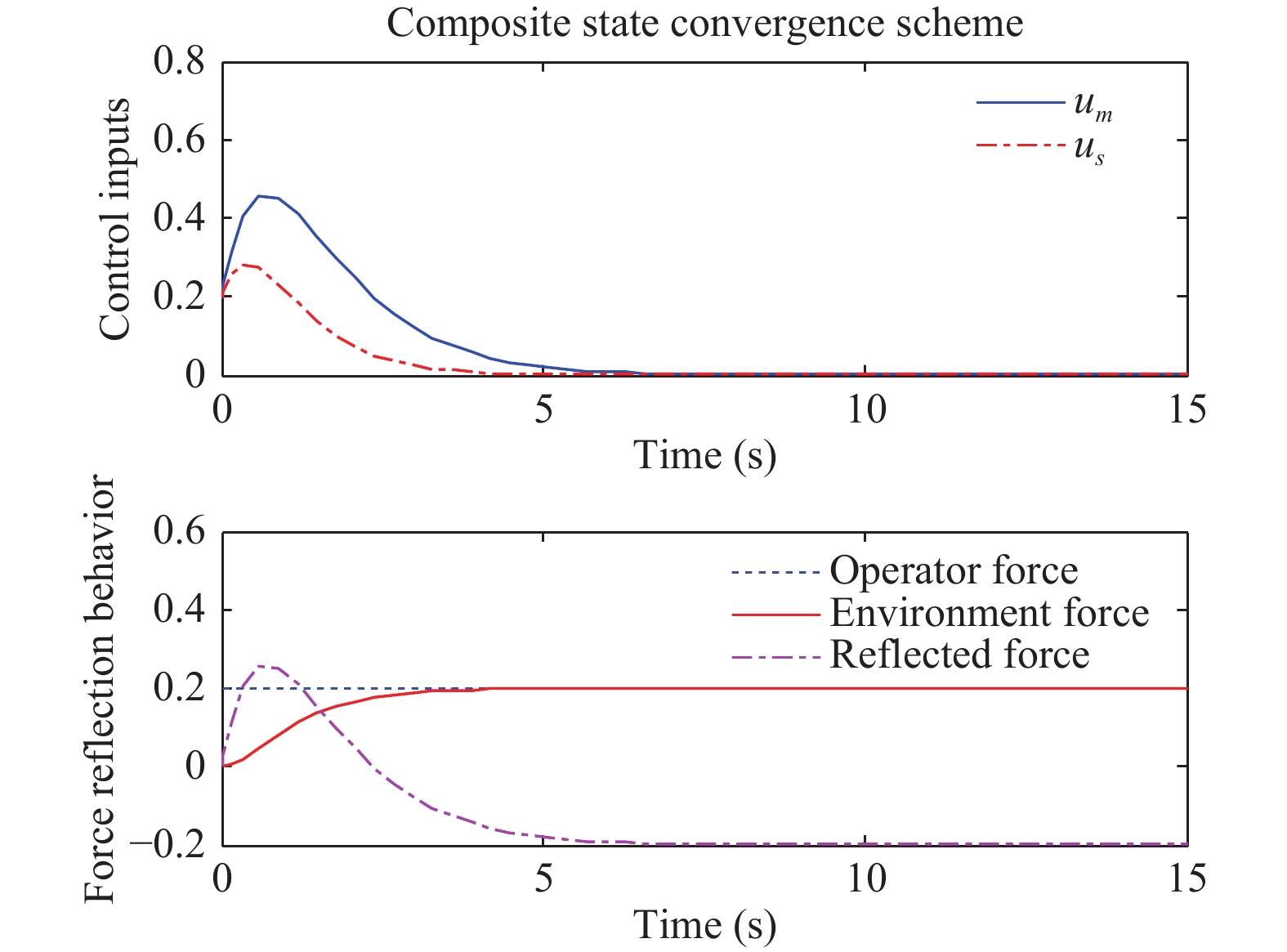
| Citation: | Muhammad Usman Asad, Umar Farooq, Jason Gu, Ghulam Abbas, Rong Liu and Valentina E. Balas, "A Composite State Convergence Scheme for Bilateral Teleoperation Systems," IEEE/CAA J. Autom. Sinica, vol. 6, no. 5, pp. 1166-1178, Sept. 2019. doi: 10.1109/JAS.2019.1911690

|

| [1] |
B. Siciliano, O. Khatib, Springer handbook of robotics, Berlin: Springer, 2008.
|
| [2] |
P. F. Hokayem, M. W. Spong, " Bilateral teleoperation: an historical survey,” Automatica, vol. 42, pp. 2035–2057, 2006. doi: 10.1016/j.automatica.2006.06.027
|
| [3] |
P. Arcara, C. Melchiorri, " Control schemes for teleoperation with time delay: a comparative study,” Robotics and Autonomous Systems, vol. 38, pp. 49–64, 2002. doi: 10.1016/S0921-8890(01)00164-6
|
| [4] |
R. Muradore, P. Fiorini, " A review of bilateral teleoperation algorithms,” Acta Polytechnica Hungarica, vol. 13, no. 1, pp. 191–208, 2016.
|
| [5] |
P. M. Kebria, H. Abdi, M. M. Dalvand, A. Khosravi, S. Nahavandi, " Control methods for internet-based teleoperation systems: a review,” IEEE Transactions on Human-Machine Systems, pp. 1–15, 2018.
|
| [6] |
A. Bolopion, S. Regnier, " A review of haptic feedback teleoperation systems for micromanipulation and microassembly,” IEEE Transactions on Automation Science and Engineering, vol. 10, no. 3, pp. 496–502, 2013. doi: 10.1109/TASE.2013.2245122
|
| [7] |
T. B. Sheridan, " Space teleoperation through time delay: review and prognosis,” IEEE Trans. on Robotics &Automation, vol. 9, no. 5, pp. 592–606, 1993.
|
| [8] |
I. J. Rudas, J. Gati, A. Szakal, K. Nemethy, " From the smart hands to teleoperations,” Acta Polytechnica Hungarica, vol. 13, no. 1, pp. 43–60, 2016.
|
| [9] |
A. A. Ghavifekr, A. R. Ghiasi, M. A. Badamchizadeh, " Discrete-time control of bilateral teleoperation systems: a review,” Robotica, vol. 36, pp. 552–569, 2017.
|
| [10] |
R. Anderson, M. W. Spong, " Bilateral control of teleoperators with time delay,” IEEE Transactions on Automatic Control, vol. 34, no. 5, pp. 494–501, 1989. doi: 10.1109/9.24201
|
| [11] |
G. Niemeyer, J. J. E. Slotine, " Stable adaptive teleoperation,” IEEE Journal of Oceanic Engineering, vol. 16, no. 1, pp. 152–162, 1991. doi: 10.1109/48.64895
|
| [12] |
Z. Chen, F. Huang, W. Sun, W. Song, " An improved wave-variable based four-channel control design in bilateral teleoperation system for time delay compensation,” IEEE Access, vol. 6, pp. 12848–12857, 2018. doi: 10.1109/ACCESS.2018.2805782
|
| [13] |
J. Ryu, D. Kwon, B. Hannaford, " Stable teleoperation with time-domain passivity control,” IEEE Transactions on Robotics and Automation, vol. 20, no. 2, pp. 365–373, 2004. doi: 10.1109/TRA.2004.824689
|
| [14] |
L. Marton, Z. Szanto, T. Haidegger, P. Galambos, J. Kovecses, " Internet based bilateral teleoperation using a revised time-domain passivity controller,” Acta Polytechnica Hungarica, vol. 14, no. 8, pp. 27–45, 2017.
|
| [15] |
Y. Ye, Y. J. Pan, Y. Gupta, J. Ware, " A power-based time domain passivity control for haptic interfaces,” IEEE Transactions on Control Systems Technology, vol. 19, no. 14, pp. 874–883, 2011.
|
| [16] |
R. Kikuuwe, K. Kanaoka, M. Yamamoto, " Phase-lead stabilization of force-projecting master-slave systems with a new sliding mode filter,” IEEE Transactions on Control Systems Technology, vol. 23, no. 6, pp. 2182–2194, 2015. doi: 10.1109/TCST.2015.2404893
|
| [17] |
A. Hace, M. Franc, " FPGA implementation of sliding mode control algorithm for scaled bilateral teleoperation,” IEEE Transactions on Industrial Electronics, vol. 9, no. 3, pp. 1291–1300, 2013. doi: 10.1109/TII.2012.2227267
|
| [18] |
J. Yan, S. E. Salcudean, " Teleoperation controller design using H∞ optimization with application to motion scaling,” IEEE Transactions on Control Systems Technology, vol. 4, no. 3, pp. 244–258, 1996. doi: 10.1109/87.491198
|
| [19] |
Z. Chen, Y. J. Pan, J. Gu, " Integrated adaptive robust control for multilateral teleoperation systems under arbitrary time delays,” International Journal of Robust and Nonlinear Control, vol. 26, no. 12, pp. 2708–2728, 2016. doi: 10.1002/rnc.v26.12
|
| [20] |
N. Chopra, M. W. Spong, R. Lozano, " Adaptive coordination control of bilateral teleoperators with time delay,” in Proc. IEEE Conf. on Decision and Control, pp. 4540–4547, 2004.
|
| [21] |
Y. Li, Y. Yin, D. Zhang, " Adaptive task-space synchronization control of bilateral teleoperation systems with uncertain parameters and communication delays,” IEEE Access, vol. 6, pp. 5740–5748, 2018. doi: 10.1109/ACCESS.2018.2789864
|
| [22] |
H. Zhang, A. Song, S. Shen, " Adaptive finite time synchronization control for teleoperation system with varying time delays,” IEEE Access, vol. 6, pp. 40940–40949, 2018. doi: 10.1109/Access.6287639
|
| [23] |
L. Chan, F. Naghdy, D. Stirling, " Application of adaptive controllers in teleoperation systems,” IEEE Transactions on Human-Machine Systems, vol. 44, no. 3, pp. 337–352, 2014. doi: 10.1109/THMS.2014.2303983
|
| [24] |
Z. Li, Y. Xia, F. Sun, " Adaptive fuzzy control for multilateral cooperative teleoperation of multiple robotic manipulators under random network-induced delays,” IEEE Transactions on Fuzzy Systems, vol. 22, no. 2, pp. 437–450, April. 2014. doi: 10.1109/TFUZZ.2013.2260550
|
| [25] |
U. Farooq, J. Gu, M. El-Hawary, M. U. Asad, G. Abbas, " Fuzzy model based bilateral control design of nonlinear tele-operation system using method of state convergence,” IEEE Access, 2016.
|
| [26] |
C. Yang, X. Wang, Z. Li, Y. Li, C. Su, " Teleoperation control based on combination of wave variable and neural Networks,” IEEE Transactions on Systems,Man,and Cybernetics:Systems, vol. 47, no. 8, pp. 2125–2136, Aug. 2017. doi: 10.1109/TSMC.2016.2615061
|
| [27] |
D. Sun, F. Naghdy, H. Du, " Neural network-based passivity control of teleoperation system under time-varying delays,” IEEE Transactions on Cybernetics, vol. 47, no. 7, pp. 1666–1680, 2017. doi: 10.1109/TCYB.2016.2554630
|
| [28] |
Y. Matsumoto, S. Katsura and K. Ohnishi, " An analysis and design of bilateral control based on disturbance observer,” in Proc. of IEEE Int. Conf. on Industrial Technology, pp. 802–807, 2003.
|
| [29] |
A. Suzuki, K. Ohnishi, " Frequency domain damping design for time-delayed bilateral teleoperation system based on modal space analysis,” IEEE Transactions on Industrial Electronics, vol. 60, no. 1, pp. 177–190, 2013. doi: 10.1109/TIE.2012.2183832
|
| [30] |
A. Mohammadi, M. Tavakoli, H. J. Marquez, " Disturbance observer-based control of non-linear haptic teleoperation system,” IET Control Theory and Applications, vol. 5, no. 18, pp. 2063–2074, 2011. doi: 10.1049/iet-cta.2010.0517
|
| [31] |
Z. Zhao, J. Yang, S. Li, W-H. Chen, " Composite nonlinear bilateral control for teleoperation systems with external disturbances,” IEEE/CAA Journal of Automatica Sinica, 2018. doi: 10.1109/JAS.2018.7511273
|
| [32] |
E. Delgado, P. Falcon, M. D. Cacho, A. Barreiro, " Four channel teleoperation with time varying delays and disturbance observers,” Mathematical Problems in Engineering, pp. 1–11, 2015.
|
| [33] |
J. M. Azorin, O. Reinoso, R. Aracil, M. Ferre, " Generalized control method by state convergence of teleoperation systems with time delay,” Automatica, vol. 40, no. 9, pp. 1575–1582, 2004. doi: 10.1016/j.automatica.2004.04.001
|
| [34] |
J. M. Azorin, O. Reinoso, R. Aracil, M. Ferre, " Control of teleoperators with communication time delay through state convergence,” Journal of Robotic Systems, vol. 21, no. 4, pp. 167–182, 2004. doi: 10.1002/(ISSN)1097-4563
|
| [35] |
Azorín J.M., Aracil R., García N.M., Pérez C., " Bilateral control of teleoperation systems through state convergence,” Advanced Robotics, vol. 31, pp. 271-288, 2007.
|
| [36] |
Y. Yana, H. Changchun, G. Xinping, " Adaptive prescribed performance control for nonlinear networked teleoperation system under time delay,” in Proc. of IEEE Conf. on Chinese Control, pp. 5608–5613, Jul. 2014.
|
| [37] |
Y. Yuan, Y. Wang, H. Yang, C. Sun, " Adaptive force reflecting control for bilateral teleoperation system under asymmetric time-varying delays,” in Proc. 37th Chinese Control Conf., pp. 687–691, Jul. 2018.
|
| [38] |
K. H-Zaad, S. E. Salcudean, " Transparency in time-delayed systems and the effect of local force feedback for transparent teleoperation,” IEEE Transactions on Robotics and Automation, vol. 18, no. 1, pp. 108–114, 2002. doi: 10.1109/70.988981
|
| [39] |
A. Aziminejad, M. Tavakoli, R. V. Patel, M. Moallem, " Transparent time-delayed bilateral teleoperation using wave variables,” IEEE Transactions on Control Systems Technology, vol. 16, no. 3, pp. 548–555, 2008. doi: 10.1109/TCST.2007.908222
|
| [40] |
U. Farooq, J. Gu, M. E. El-Hawary, M. U. Asad, J. Luo, " An extended state convergence architecture for multilateral teleoperation systems,” IEEE Access, vol. 5, 2017.
|
Figures(15)







 DownLoad:
DownLoad: