A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
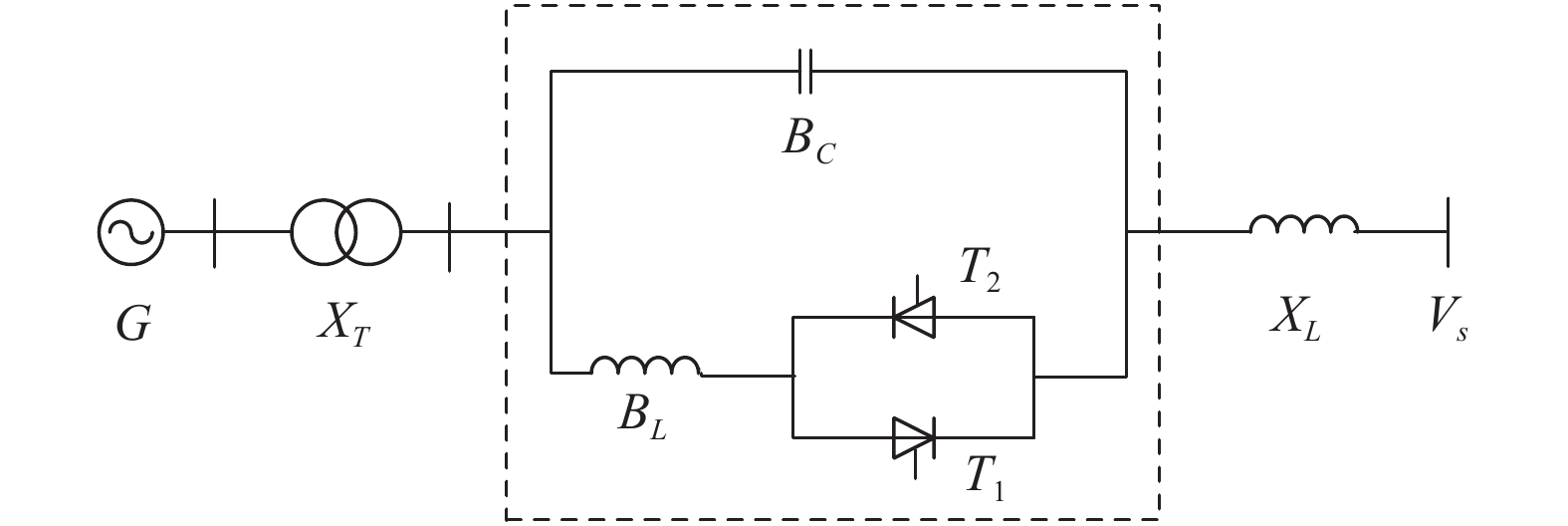
| Citation: | Yanhong Luo, Shengnan Zhao, Dongsheng Yang and Huaguang Zhang, "A New Robust Adaptive Neural Network Backstepping Control for Single Machine Infinite Power System With TCSC," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 48-56, Jan. 2020. doi: 10.1109/JAS.2019.1911798

|

| [1] |
Q. Lu, S. W. Mei, and Y. Z. Sun, Power System Nonlinear Control, Beijing: Tsinghua University Press, 2008.
|
| [2] |
A. D. Del Rosso, C. A. Canizares, and V. M. Dona, " A study of TCSC controller design for power system stability improvement,” IEEE Trans. Power Syst., vol. 18, no. 4, pp. 1487–1496, Nov. 2003. doi: 10.1109/TPWRS.2003.818703
|
| [3] |
B. Chaudhuri and B. Pal, " Robust damping of multiple swing modes employing global stabilizing signals with a TCSC,” IEEE Trans. Power Syst., vol. 19, no. 1, pp. 499–506, Jun. 2004. doi: 10.1109/TPWRS.2003.821463
|
| [4] |
B. K. Kunar, S. N. Singh, and S. C. Srivastava, " A modal controllability index for optimal placement of TCSC to damp inter-area oscillations,” in IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 2005.
|
| [5] |
Y. Wang, Y. L. Tan, and G. Guo, " Robust nonlinear co-ordinated excitation and TCSC control for power systems,” IEE Proc. Gener. Transm. Distrib., vol. 149, no. 3, pp. 367–372, Aug. 2002. doi: 10.1049/ip-gtd:20020283
|
| [6] |
K. M. Son and J. K. Park, " On the robust LQG control of TCSC for damping power system oscillations,” IEEE Trans. Power Syst., vol. 15, no. 4, pp. 1306–1312, Nov. 2000. doi: 10.1109/59.898106
|
| [7] |
T. Z. Jiang and C. Chen, " A design method of nonlinear optimal predictive controller for thyristor controlled series compensation,” Electr. Power Syst. Res., vol. 76, no. 9–10, pp. 753–759, Jun. 2006. doi: 10.1016/j.jpgr.2005.10.006
|
| [8] |
G. I. Rashed, H. I. Shaheen, and S. J. Cheng, " Nonlinear PI predictive control design for thyristor controlled series compensator,” in Proc. IEEE/PES Transmission and Distribution Conf. and Exposition, Chicago, IL, USA, 2008.
|
| [9] |
L. Zhu, H. M. Liu, Z. X. Cai, and Y. X. Ni, " Nonlinear backstepping design of robust adaptive modulation controller for TCSC,” in Proc. IEEE Power Engineering Society General Meeting, Montreal, Que., Canada, 2006.
|
| [10] |
N. Jiang, B. Liu, J. X. Kang, Y. W. Jing, and T. Zhang, " The design of nonlinear disturbance attenuation controller for TCSC robust model of power system,” Nonlinear Dyn., vol. 67, no. 3, pp. 1863–1870, Feb. 2012. doi: 10.1007/s11071-011-0113-4
|
| [11] |
B. Q. Zhang and L. Y. Sun, " Indirect fuzzy adaptive backstepping controller design for TCSC,” in Proc. 25th Chinese Control and Decision Conf. (CCDC), Guiyang, China, 2013.
|
| [12] |
C. Zhang, X. Wang, Z. F. Ming, and Z. Chai, " Enhanced nonlinear robust control for TCSC in power system,” Math. Probl. Eng., vol. 67, no. 3, pp. 1863–1870, Feb. 2012.
|
| [13] |
P. R. Gandhi and S. K. Joshi, " Smart control techniques for design of TCSC and PSS for stability enhancement of dynamical power system,” Appl. Soft. Comput., vol. 24, pp. 654–668, Nov. 2014. doi: 10.1016/j.asoc.2014.08.017
|
| [14] |
W. Yao, J. K. Fang, P. Zhao, S. L. Liu, J. Y. Wen, and S. R. Wang, " TCSC nonlinear adaptive damping controller design based on RBF neural network to enhance power system stability,” J. Electr. Eng. Technol., vol. 8, no. 2, pp. 252–261, Mar. 2013. doi: 10.5370/JEET.2013.8.2.252
|
| [15] |
Y. Wang, Y. W. Jing, and W. L. Zhao, " A robust adaptive modulation controller design based on backstepping for thyristor controlled series capacitor,” in Proc. Chinese Control and Decision Conf. (CCDC), Mianyang, China, 2011.
|
| [16] |
A. H. Tahoun, " Adaptive actuator failure compensation design for unknown chaotic multi-input systems,” Int. J. Adapt. Control Signal Process, vol. 29, no. 4, pp. 494–504, Apr. 2014.
|
| [17] |
A. H. Tahoun, " Adaptive stabilizer for chaotic networked systems with network-induced delays and packet losses,” Nonlinear Dyn., vol. 81, no. 1–2, pp. 823–832, Jul. 2015. doi: 10.1007/s11071-015-2032-2
|
| [18] |
J. K. Liu, RBF Neural Network Adaptive Control MATLAB Simulation, Beijing: Tsinghua University Press, 2014.
|
| [19] |
Y. J. Liu and S. C. Tong, " Adaptive NN tracking control of uncertain nonlinear discrete-time systems with nonaffine dead-zone input,” IEEE Trans. Cybern., vol. 45, no. 3, pp. 497–505, Mar. 2015. doi: 10.1109/TCYB.2014.2329495
|
| [20] |
Y. J. Liu, S. C. Tong, C. L. P. Chen, and D. J. Li, " Neural controller design-based adaptive control for nonlinear MIMO systems with unknown hysteresis inputs,” IEEE Trans. Cybern., vol. 46, no. 1, pp. 9–19, Jan. 2016. doi: 10.1109/TCYB.2015.2388582
|
| [21] |
J. Q. Han, " The extended state observer of a class of uncertain systems,” Contr. Decision, vol. 10, no. 1, pp. 85–88, Jan. 1995.
|
| [22] |
Z. Q. Pu, R. Y. Yuan, J. Q. Yi, and X. M. Tan, " A class of adaptive extended state observers for nonlinear disturbed systems,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5858–5869, Sep. 2015. doi: 10.1109/TIE.2015.2448060
|
| [23] |
Y. Huang, K. K. Xu, J. Q. Han, and J. Lam, " Flight control design using extended state observer and non-smooth feedback,” in Proc. 40th IEEE Conf. Decision and Control (Cat. No. 01CH37228), Orlando, FL, USA, 2002.
|
| [24] |
H. J. Yang and J. K. Liu, " An adaptive RBF neural network control method for a class of nonlinear systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 457–462, Mar. 2018. doi: 10.1109/JAS.2017.7510820
|
| [25] |
X. F. Yuan, Y. N. Wang, W. Sun, and L. H. Wu, " RBF networks-based adaptive inverse model control system for electronic throttle,” IEEE Trans. Contr. Syst. Technol., vol. 18, no. 3, pp. 750–756, May 2010. doi: 10.1109/TCST.2009.2026397
|
| [26] |
J. M. Zhang, C. Y. Sun, R. M. Zhang, and C. S. Qian, " Adaptive sliding mode control for re-entry attitude of near space hypersonic vehicle based on backstepping design,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 1, pp. 94–101, 2015. doi: 10.1109/JAS.2015.7032910
|
| [27] |
D. W. Qian and G. L. Fan, " Neural-network-based terminal sliding mode control for frequency stabilization of renewable power systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 706–717, Mar. 2018. doi: 10.1109/JAS.2018.7511078
|
| [28] |
C. Kwan and R. Xu, " A note on simultaneous isolation of sensor and actuator faults,” IEEE Trans. Contr. Syst. Technol., vol. 12, no. 1, pp. 183–192, Jan. 2004. doi: 10.1109/TCST.2003.821960
|
| [29] |
H. A. Talebi, K. Khorasani, and S. Tafazoli, " A recurrent neural-networkbased sensor and actuator fault detection and isolation for nonlinear systems with application to the satellites attitude control subsystem,” IEEE Trans. Neural Netw., vol. 20, no. 1, pp. 45–60, Jan. 2009. doi: 10.1109/TNN.2008.2004373
|
| [30] |
H. A. Talebi and K. Khorasani, " A neural network-based multiplicative actuator fault detection and isolation of nonlinear systems,” IEEE Trans. Contr. Syst. Technol., vol. 21, no. 3, pp. 842–851, May 2013. doi: 10.1109/TCST.2012.2186634
|
| [31] |
Z. W. Gao, " Fault estimation and fault-tolerant control for discrete-time dynamic systems,” IEEE Trans. Ind. Electron., vol. 62, no. 6, pp. 3874–3884, Jun. 2015.
|
| [32] |
C. R. Carcel and A. Starr, " Data-based detection and diagnosis of faults in linear actuators,” IEEE Trans. Instrum. Meas., vol. 67, no. 9, pp. 2035–2047, Sep. 2018. doi: 10.1109/TIM.2018.2814067
|
| [33] |
A. A. Amin and K. M. UI. Hasan, " Advanced fault tolerant air-fuel ratio control of internal combustion gas engine for sensor and actuator faults,” IEEE Access, vol. 7, pp. 17634–17643, Feb. 2018.
|
| [34] |
J. H. Park, S. H. Huh, S. H. Kim, S. J. Seo, and G. T. Park, " Direct adaptive controller for nonaffine nonlinear systems using self-structuring neural network,” IEEE Trans. Neural Netw., vol. 16, no. 2, pp. 414–422, Mar. 2005. doi: 10.1109/TNN.2004.841786
|
| [35] |
T. P. Zhang and S. S. Ge, " Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs,” Automatica, vol. 43, no. 6, pp. 1021–1033, Jun. 2007. doi: 10.1016/j.automatica.2006.12.014
|
| [36] |
H. G. Zhang, Y. H. Luo, and D. Liu, " Neural-network-based near-optimal control for a class of discrete-time affine nonlinear systems with control constraints,” IEEE Trans. Neural Netw., vol. 20, no. 9, pp. 1490–1503, Sep. 2009. doi: 10.1109/TNN.2009.2027233
|
| [37] |
S. S. Ge and C. Wang, " Adaptive neural control of uncertain MIMO nonlinear systems,” IEEE Trans. Neural Netw., vol. 15, no. 3, pp. 674–692, May 2004. doi: 10.1109/TNN.2004.826130
|
| [38] |
H. G. Zhang, C. Qin, and Y. H. Luo, " Neural-network-based constrained optimal control scheme for discrete-time switched nonlinear system using dual heuristic programming,” IEEE Trans. Autom. Sci. Eng., vol. 11, no. 3, pp. 839–849, Jul. 2014. doi: 10.1109/TASE.2014.2303139
|
| [39] |
Q. Wei, H. G. Zhang, and L. Cui, " Data-based optimal control for discrete-time zero-sum games of 2-D systems using adaptive critic designs,” Acta Automatica Sinica, vol. 35, no. 6, pp. 682–692, Jun. 2009.
|
| [40] |
B. H. Wang, C. W. Yang, and Q. Zhang, " Design of adaptive backstepping controller for TCSC,” Electr. Power Autom. Equipment, vol. 25, no. 4, pp. 59–61, Apr. 2005.
|
Figures(5) / Tables(1)






 DownLoad:
DownLoad: