A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 4
Volume 7
Issue 4
IEEE/CAA Journal of Automatica Sinica
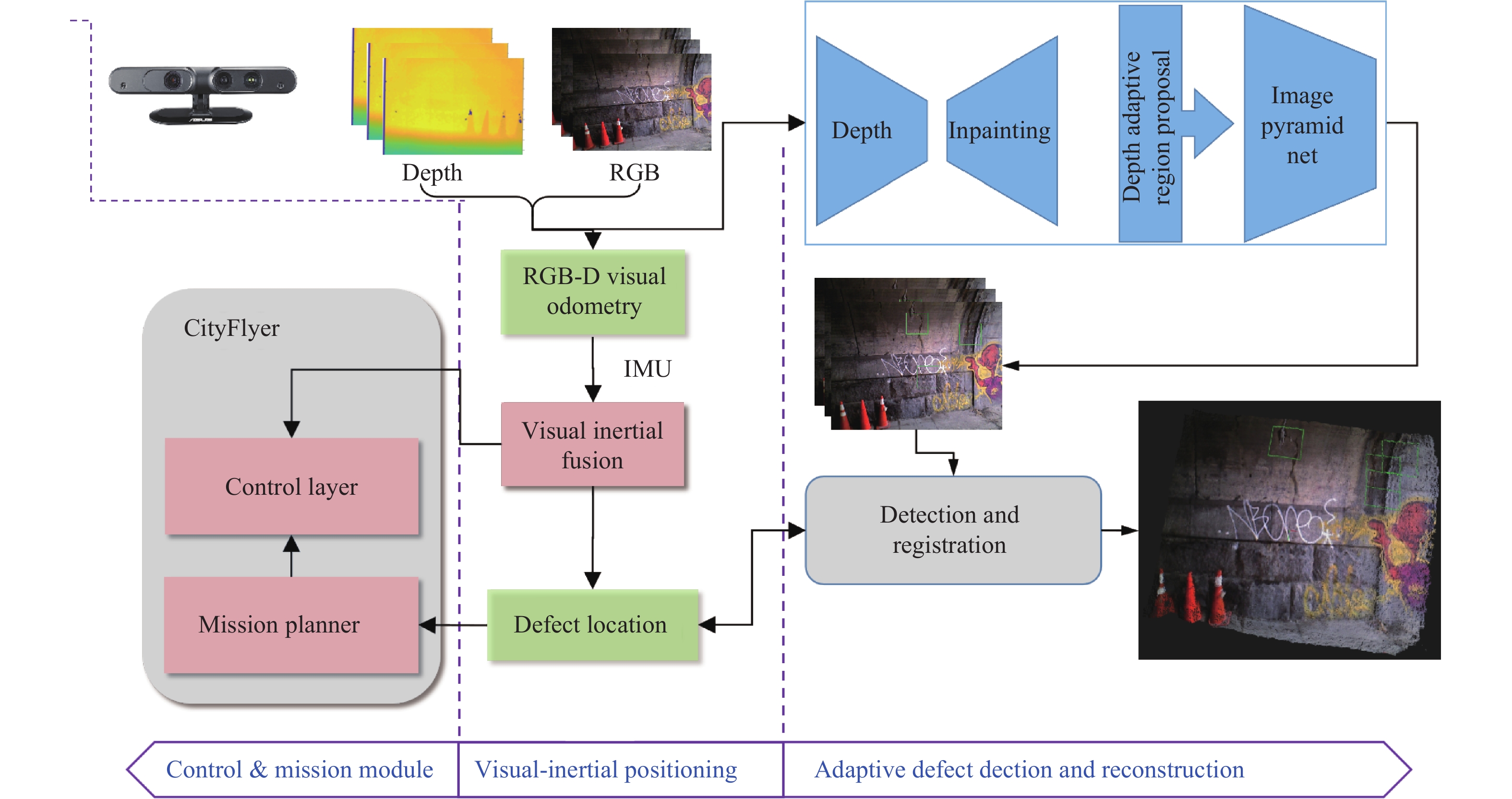
| Citation: | Liang Yang, Bing Li, Wei Li, Howard Brand, Biao Jiang and Jizhong Xiao, "Concrete Defects Inspection and 3D Mapping Using CityFlyer Quadrotor Robot," IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 991-1002, July 2020. doi: 10.1109/JAS.2020.1003234

|

| [1] |
N. Gucunski and H. Parvardeh, “Condition assessment of bridge deck using various nondestructive evaluation (NDE) technologies,” Center of Advanced Infrastructure and Transportation, Rutgers Univ., USA, Jun. 2015.
|
| [2] |
U.S. Department of Transportation Federal Highway Administration, “Specification for the national bridge inventory bridge elements,” U.S. Department of Transportation Federal Highway Administration, USA, 2014.
|
| [3] |
N. Y. D. of Transportation, “Bridge inspection manual,” Jan. 2016. [Online]. Available: https://www.dot.ny.gov/divisions/engineering/structures/manuals/bridge-inspection
|
| [4] |
B. William and E. Steve, “Tunnel operations, maintenance, inspection, and evaluation (TOMIE) manual,” Federal Highway Administration, Washington, DC, USA, Jul. 2015.
|
| [5] |
R. S. Lim, H. M. La, and W. H. Sheng, “A robotic crack inspection and mapping system for bridge deck maintenance,” IEEE Trans. Autom. Sci. Eng., vol. 11, no. 2, pp. 367–378, Jan. 2014. doi: 10.1109/TASE.2013.2294687
|
| [6] |
P. Prasanna, K. J. Dana, N. Gucunski, B. B. Basily, H. M. La, R. S. Lim, and H. Parvardeh, “Automated crack detection on concrete bridges,” IEEE Trans. Autom. Sci. Eng., vol. 13, no. 2, pp. 591–599, Oct. 2016. doi: 10.1109/TASE.2014.2354314
|
| [7] |
H. M. La, N. Gucunski, K. Dana, and S. H. Kee, “Development of an autonomous bridge deck inspection robotic system,” J. Field Rob., vol. 34, no. 8, pp. 1489–1504, Dec. 2017. doi: 10.1002/rob.21725
|
| [8] |
N. Hallermann and G. Morgenthal, “Visual inspection strategies for large bridges using unmanned aerial vehicles (UAV),” in Proc. 7th IABMAS, Int. Conf. Bridge Maintenance, Safety and Management, Washington, DC, USA, 2014, pp. 661–667.
|
| [9] |
Z. Ren, K. Qian, Z. X. Zhang, V. Pandit, A. Baird, and B. Schuller, “Deep scalogram representations for acoustic scene classification,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 662–669, May 2018. doi: 10.1109/JAS.2018.7511066
|
| [10] |
D. Yu and J. Y. Li, “Recent progresses in deep learning based acoustic models,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 3, pp. 396–409, Jul. 2017. doi: 10.1109/JAS.2017.7510508
|
| [11] |
Z. W. Wang, M. C. Zhou, G. G. Slabaugh, J. F. Zhai, and T. Fang, “Automatic detection of bridge deck condition from ground penetrating radar images,” IEEE Trans. Autom. Sci. Eng., vol. 8, no. 3, pp. 633–640, Dec. 2011. doi: 10.1109/TASE.2010.2092428
|
| [12] |
G. Li, S. H. He, Y. F. Ju, and K. Du, “Long-distance precision inspection method for bridge cracks with image processing,” Autom. Constr., vol. 41, pp. 83–95, May 2014. doi: 10.1016/j.autcon.2013.10.021
|
| [13] |
R. S. Adhikari, O. Moselhi, and A. Bagchi, “Image-based retrieval of concrete crack properties for bridge inspection,” Autom. Constr., vol. 39, pp. 180–194, Apr. 2014. doi: 10.1016/j.autcon.2013.06.011
|
| [14] |
M. R. Jahanshahi and S. F. Masri, “Adaptive vision-based crack detection using 3D scene reconstruction for condition assessment of structures,” Autom. Constr., vol. 22, pp. 567–576, Mar. 2012. doi: 10.1016/j.autcon.2011.11.018
|
| [15] |
S. K. Sinha and P. W. Fieguth, “Automated detection of cracks in buried concrete pipe images,” Autom. Constr., vol. 15, no. 1, pp. 58–72, Jan. 2006. doi: 10.1016/j.autcon.2005.02.006
|
| [16] |
T. H. Dinh, Q. P. Ha, and H. La, “Computer vision-based method for concrete crack detection,” in Proc. 14th Int. Conf. Control, Automation, Robotics and Vision, Phuket, Thailand, 2016, pp. 1–6.
|
| [17] |
L. L. Wu, S. Mokhtari, A. Nazef, B. Nam, and H. B. Yun, “Improvement of crack-detection accuracy using a novel crack defragmentation technique in image-based road assessment,” J. Comput. Civ. Eng., vol. 30, no. 1, pp. 04014118, Jan. 2016. doi: 10.1061/(ASCE)CP.1943-5487.0000451
|
| [18] |
L. Yang, B. Li, W. Li, Z. M. Liu, G. Y. Yang, and J. Z. Xiao, “A robotic system towards concrete structure spalling and crack database,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, Macau, China, 2017, pp. 1276–1281.
|
| [19] |
L. Yang, B. Li, W. Li, Z. M. Liu, G. Y. Yang, and J. Z. Xiao, “Deep concrete inspection using unmanned aerial vehicle towards CSSC database,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Vancouver, Canada, 2017, pp. 24–27.
|
| [20] |
I. Dryanovski, R. G. Valenti, and J. Z. Xiao, “An open-source navigation system for micro aerial vehicles,” Auton. Rob., vol. 34, no. 3, pp. 177–188, Mar. 2013. doi: 10.1007/s10514-012-9318-8
|
| [21] |
R. G. Valenti, Y. D. Jian, K. Ni, and J. Z. Xiao, “An autonomous flyer photographer,” in Proc. IEEE Int. Conf. Cyber Technology in Automation, Control, and Intelligent Systems, Chengdu, China, 2016, pp. 273–278.
|
| [22] |
R. Mur-Artal and J. D. Tardòs, “ORB-SLAM2: An open-source slam system for monocular, stereo, and RGB-D cameras,” IEEE Trans. Rob., vol. 33, no. 5, pp. 1255–1262, Jun. 2017. doi: 10.1109/TRO.2017.2705103
|
| [23] |
H. Z. Fang, N. Tian, Y. B. Wang, M. C. Zhou, and M. A. Haile, “Nonlinear Bayesian estimation: From Kalman filtering to a broader horizon,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 401–417, Feb. 2018. doi: 10.1109/JAS.2017.7510808
|
| [24] |
T. Y. Lin, P. Dollár, R. Girshick, K. M. He, B. Hariharan, and S. Belongie, “Feature pyramid networks for object detection,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017, pp. 936–944.
|
| [25] |
K. M. He, X. Y. Zhang, S. Q. Ren, and J. Sun, “Deep residual learning for image recognition,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016, pp. 770–778.
|
| [26] |
K. Simonyan and A. Zisserman, “Very deep convolutional networks for large-scale image recognition,” arXiv preprint arXiv: 1409.1556, Sept. 2014.
|
| [27] |
A. Krizhevsky, I. Sutskever, and G. E. Hinton, “ImageNet classification with deep convolutional neural networks,” in Proc. 25th Int. Conf. Neural Information Processing Systems, Lake Tahoe, USA, 2012, pp. 1097–1105.
|
| [28] |
H. Y. Xue, S. M. Zhang, and D. Cai, “Depth image inpainting: Improving low rank matrix completion with low gradient regularization,” IEEE Trans. Image Process., vol. 26, no. 9, pp. 4311–4320, Sept. 2017. doi: 10.1109/TIP.2017.2718183
|
| [29] |
Y. D. Zhang and T. Funkhouser, “Deep depth completion of a single RGB-D image,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 2018, pp. 175–185.
|
| [30] |
O. Ronneberger, P. Fischer, and T. Brox, “U-Net: Convolutional networks for biomedical image segmentation,” in Proc. 18th Int. Conf. Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 2015, pp. 234–241.
|
| [31] |
A. Levin, D. Lischinski, and Y. Weiss, “Colorization using optimization,” in Proc. ACM SIGGRAPH, California, USA, 2004, pp. 689–694.
|
| [32] |
W. Q. Liu and S. E. Chen, “Reliability analysis of bridge evaluations based on 3D light detection and ranging data,” Struct. Control Health Monit., vol. 20, no. 12, pp. 1397–1409, Dec. 2013. doi: 10.1002/stc.1533
|
| [33] |
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint Kalman filter for vision-aided inertial navigation,” in Proc. IEEE Int. Conf. Robotics and Automation, Roma, Italy, 2007, pp. 3565–3572.
|
| [34] |
L. Armesto, J. Tornero, and M. Vincze, “Fast ego-motion estimation with multi-rate fusion of inertial and vision,” Int. J. Rob. Res., vol. 26, no. 6, pp. 577–589, Jun. 2007. doi: 10.1177/0278364907079283
|
| [35] |
R. ümmerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, “G.2o: A general framework for graph optimization,” in Proc. IEEE Int. Conf. Robotics and Automation, Shanghai, China, 2011, pp. 3607–3613.
|
| [36] |
L. Yang, B. Li, W. Li, B. Jiang, and J. Z. Xiao, “Semantic metric 3D reconstruction for concrete inspection,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 2018.
|
| [37] |
B. Limketkai, D. Fox, and L. Liao, “CRF-filters: Discriminative particle filters for sequential state estimation,” in Proc. IEEE Int. Conf. Robotics and Automation, Roma, Italy, 2007, pp. 3142–3147.
|
| [38] |
A. Kundu, Y. Li, F. Dellaert, F. X. Li, and J. M. Rehg, “Joint semantic segmentation and 3D reconstruction from monocular video,” in Proc. 13th European Conf. Computer Vision, Zurich, Switzerland, 2014, pp. 703–718.
|
| [39] |
S. C. Gao, M. C. Zhou, Y. R. Wang, J. J. Cheng, H. Yachi, and J. H. Wang, “Dendritic neuron model with effective learning algorithms for classification, approximation, and prediction,” IEEE Trans. Neural Networks Learn. Syst., vol. 30, no. 2, pp. 601–614, Feb. 2019. doi: 10.1109/TNNLS.2018.2846646
|
Figures(11) / Tables(5)







 DownLoad:
DownLoad: