A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 8
Issue 9
Volume 8
Issue 9
IEEE/CAA Journal of Automatica Sinica
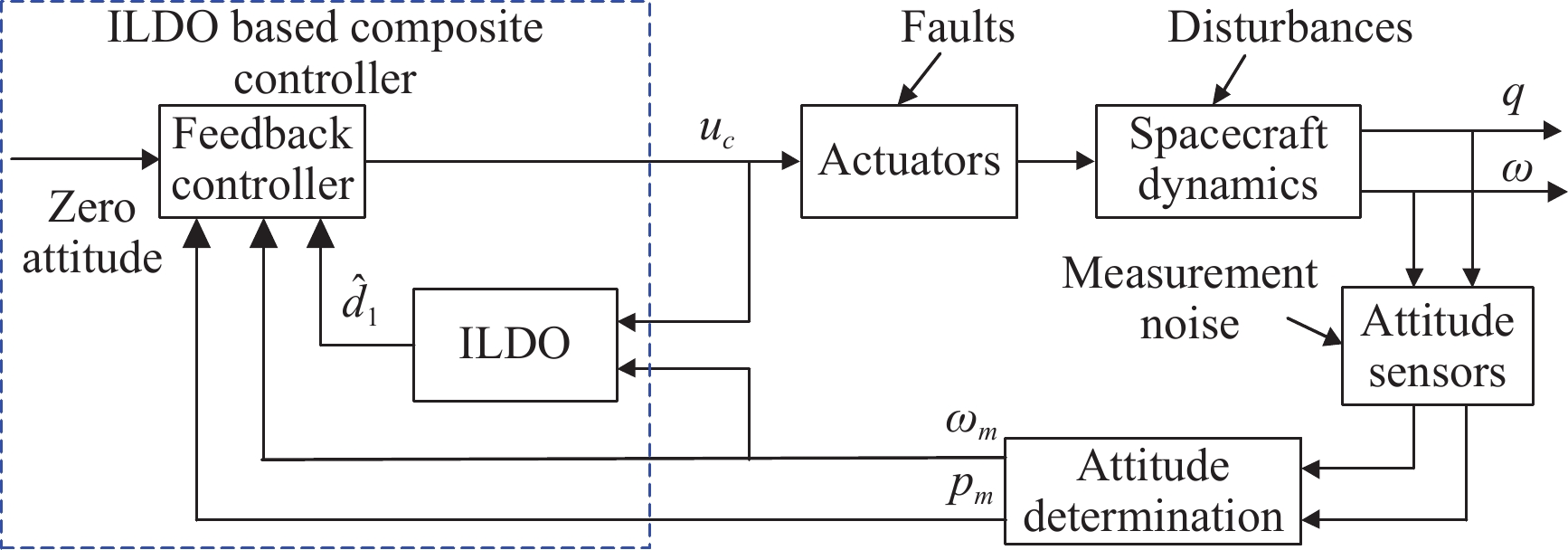
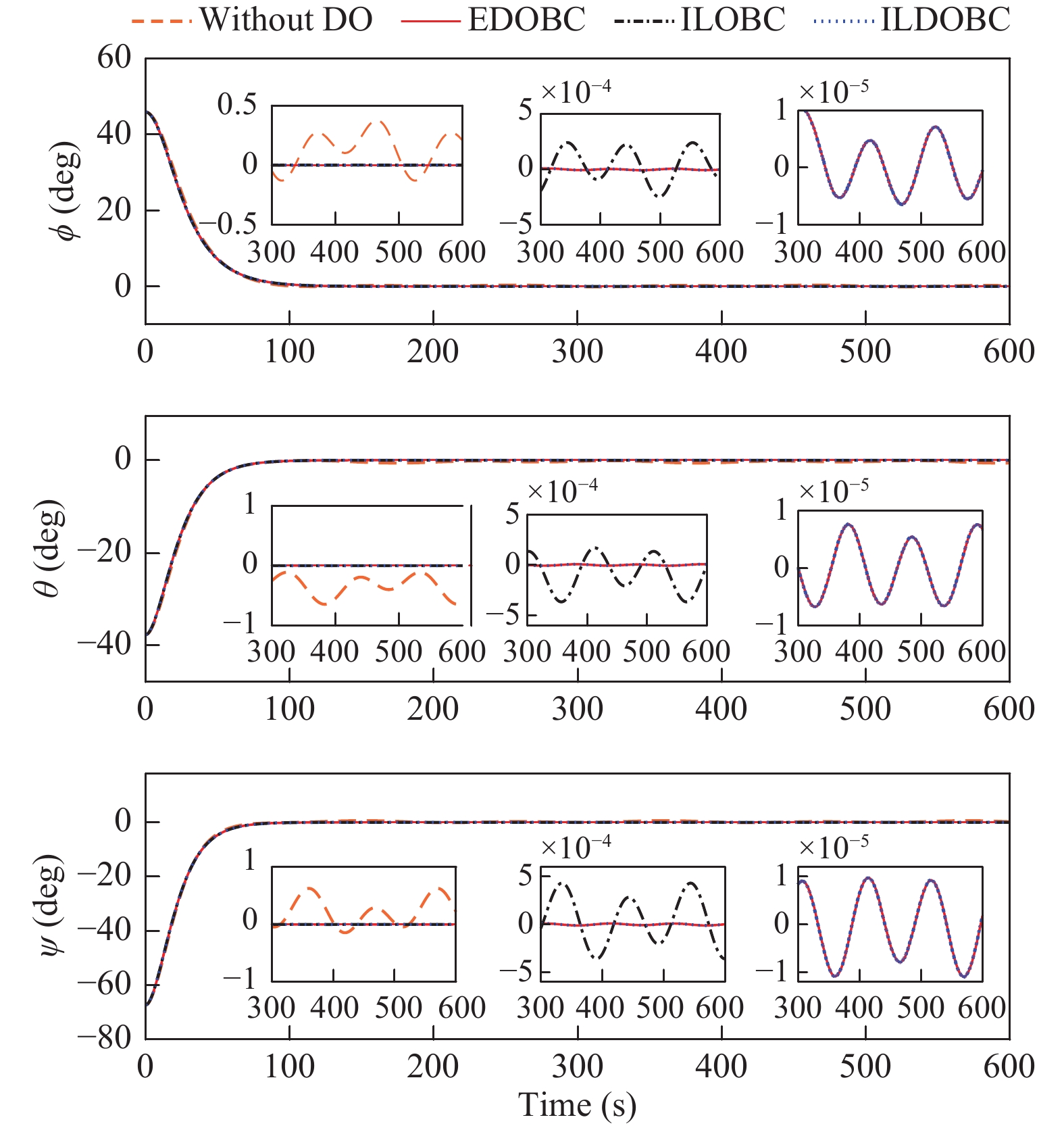
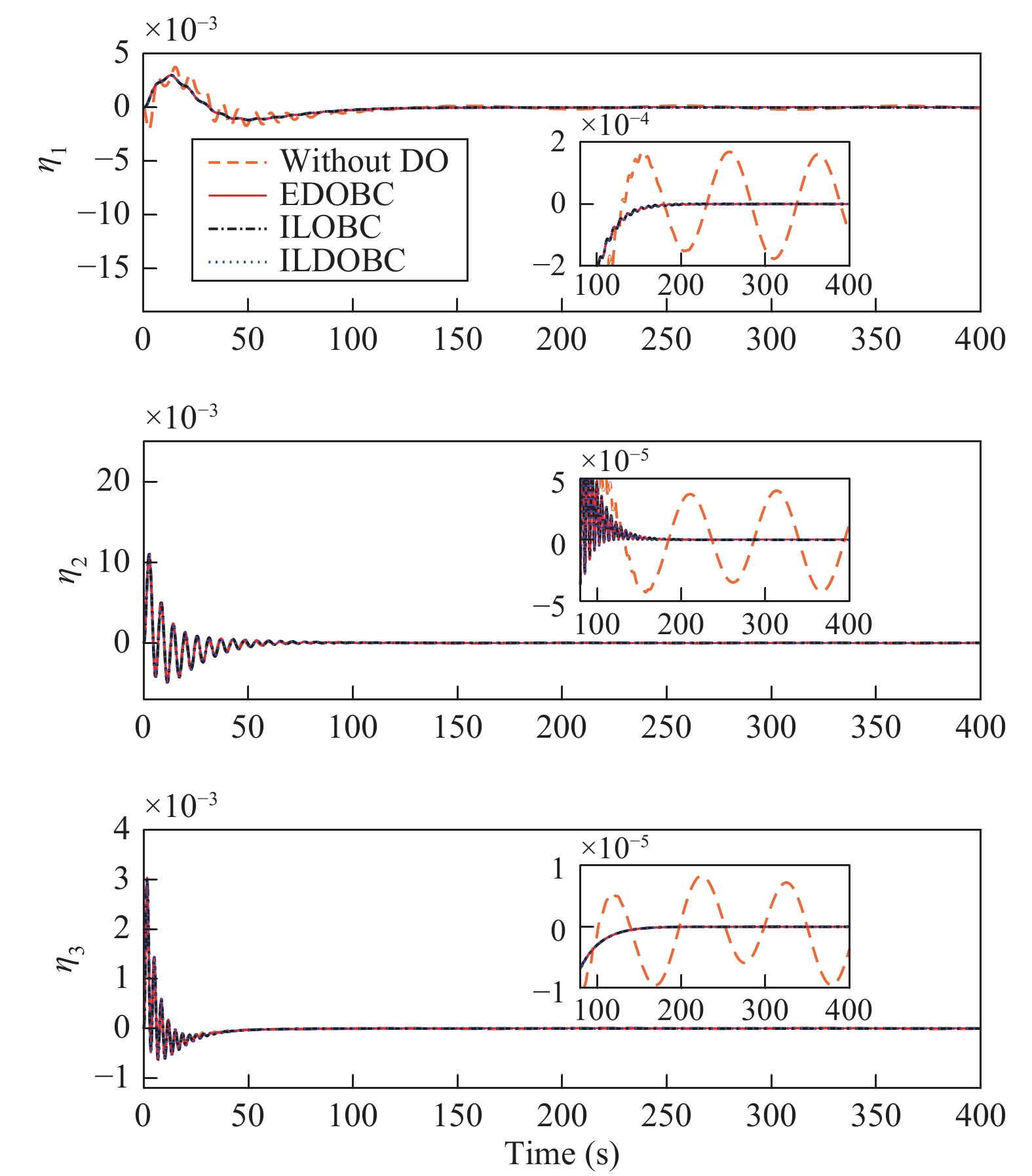
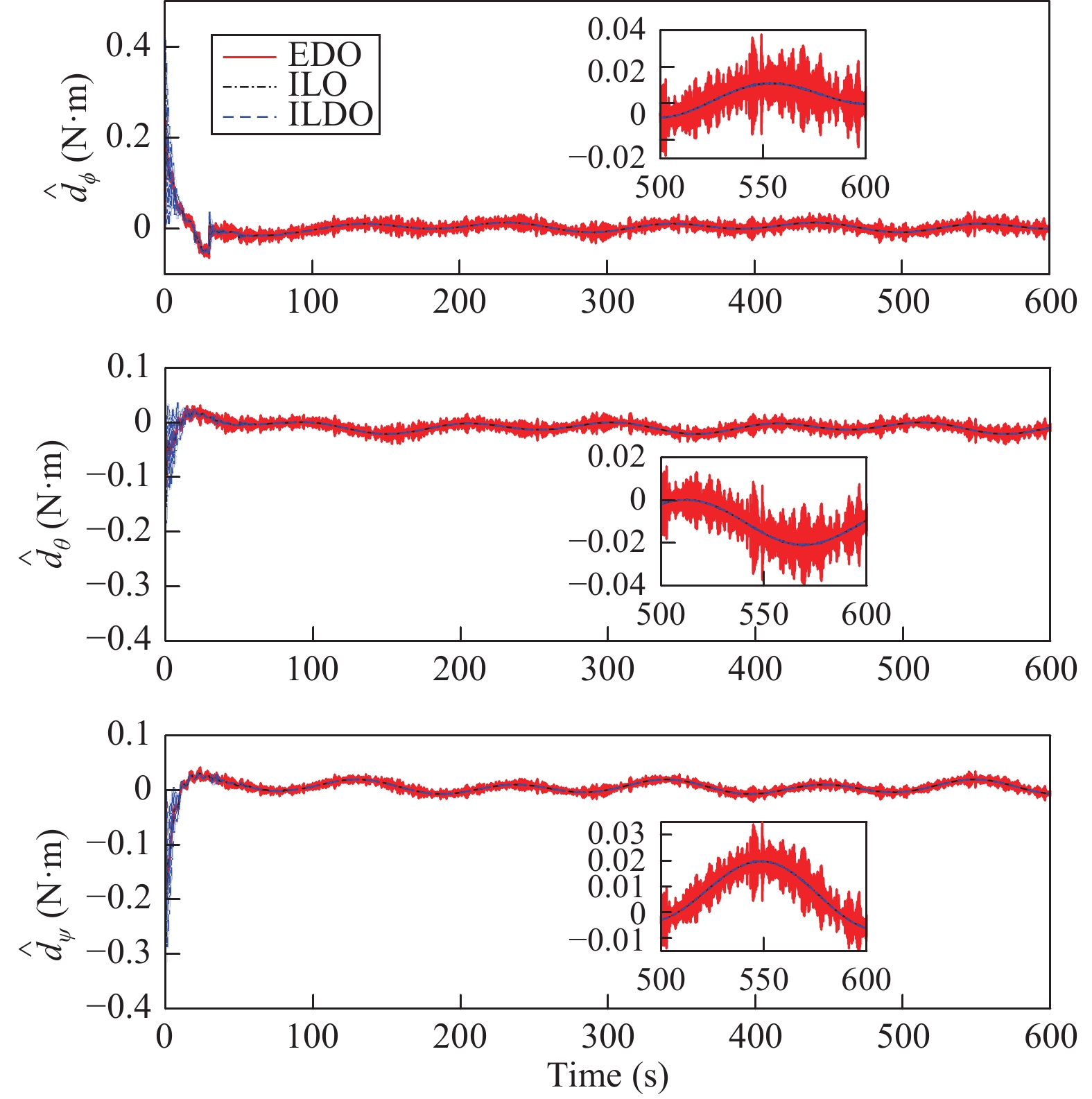
| Citation: | T. F. He, Z. Wu, "Iterative Learning Disturbance Observer Based Attitude Stabilization of Flexible Spacecraft Subject to Complex Disturbances and Measurement Noises," IEEE/CAA J. Autom. Sinica, vol. 8, no. 9, pp. 1576-1587, Sep. 2021. doi: 10.1109/JAS.2021.1003958

|

| [1] |
C. Liu, D. Ye, K. K. Shi, and Z. W. Sun, “Robust high-precision attitude control for flexible spacecraft with improved mixed H2/H∞ control strategy under poles assignment constraint,” Acta Astronaut., vol. 136, pp. 166–175, Jul. 2017. doi: 10.1016/j.actaastro.2017.03.009
|
| [2] |
B. Xiao, S. Yin, and O. Kaynak, “Attitude stabilization control of flexible satellites with high accuracy: an estimator-based approach,” IEEE-ASME Trans. Mechatron., vol. 22, no. 1, pp. 349–358, 2017. doi: 10.1109/TMECH.2016.2614839
|
| [3] |
J. Z. Qiao, Z. X. Li, J. W. Xu, and X. Yu, “Composite nonsingular terminal sliding mode attitude controller for spacecraft with actuator dynamics under matched and mismatched disturbances,” IEEE Trans. Ind. Informat., vol. 16, no. 2, pp. 1153–1162, 2020. doi: 10.1109/TII.2019.2936172
|
| [4] |
L. Sun and Z. W. Zheng, “Disturbance-observer-based robust backstepping attitude stabilization of spacecraft under input saturation and measurement uncertainty,” IEEE Trans. Ind. Electron., vol. 64, no. 10, pp. 7994–8002, Oct. 2017. doi: 10.1109/TIE.2017.2694349
|
| [5] |
P. Singla, K. Subbarao, and J. L. Junkins, “Adaptive output feedback control for spacecraft rendezvous and docking under measurement uncertainty,” J. Guid. Control Dyn., vol. 29, no. 4, pp. 892–902, Jul. 2006. doi: 10.2514/1.17498
|
| [6] |
Q. L. Hu and B. Xiao, “Intelligent proportional-derivative control for flexible spacecraft attitude stabilization with unknown input saturation,” Aerosp. Sci. Technol., vol. 23, no. 1, pp. 63–74, Jun. 2012. doi: 10.1016/j.ast.2011.06.003
|
| [7] |
Y. Li and F. Yang, “Robust adaptive attitude control for non-rigid spacecraft with quantized control input,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 472–481, Mar. 2020. doi: 10.1109/JAS.2020.1003000
|
| [8] |
L. Chen, Y. Yan, C. X. Mu, and C. Y. Sun, “Characteristic model-based discrete-time sliding mode control for spacecraft with variable tilt of flexible structures,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 1, pp. 42–50, Jan. 2016. doi: 10.1109/JAS.2016.7373761
|
| [9] |
S. N. Wu, W. M. Chu, X. Ma, G. Radice, and Z. G. Wu, “Multi-objective integrated robust H∞ control for attitude tracking of a flexible spacecraft,” Acta Astronaut., vol. 151, pp. 80–87, Oct. 2018. doi: 10.1016/j.actaastro.2018.05.062
|
| [10] |
C. Liu, K. K. Shi, and Z. W. Sun, “Robust H∞ controller design for attitude stabilization of flexible spacecraft with input constraints,” Adv. Space Res., vol. 63, no. 5, pp. 1498–1522, Nov. 2019. doi: 10.1016/j.asr.2018.10.043
|
| [11] |
Z. J. Liu, J. K. Liu, and L. J. Wang, “Disturbance observer based attitude control for flexible spacecraft with input magnitude and rate constraints,” Aerosp. Sci. Technol., vol. 72, pp. 486–492, Jan. 2018. doi: 10.1016/j.ast.2017.11.036
|
| [12] |
T. Chen and H. Wen, “Autonomous assembly with collision avoidance of a fleet of flexible spacecraft based on disturbance observer,” Acta Astronautica, vol. 147, pp. 86–96, Mar. 2018. doi: 10.1016/j.actaastro.2018.03.027
|
| [13] |
Y. K. Zhu, L. Guo, J. Z Qiao, and W. S. Li, “An enhanced anti-disturbance attitude control law for flexible spacecrafts subject to multiple disturbances,” Control Eng. Practice, vol. 84, pp. 274–283, Mar. 2019. doi: 10.1016/j.conengprac.2018.11.001
|
| [14] |
J. Back and H, Shim, “Adding robustness to nominal output-feedback controllers for uncertain nonlinear systems: A nonlinear version of disturbance observer,” Automatica, vol. 44, no. 10, pp. 2528–2537, Oct. 2008. doi: 10.1016/j.automatica.2008.02.024
|
| [15] |
J. Yang, S. H. Li, and W. H. Chen, “Nonlinear disturbance observer-based control for multi-input multi-output nonlinear systems subject to mismatching condition,” Int. J. Control, vol. 85, no. 8, pp. 1071–1082, Aug. 2012. doi: 10.1080/00207179.2012.675520
|
| [16] |
X. Wei and L. Guo, “Composite disturbance-observer-based control and H∞ control for complex continuous models,” Int. J. Robust Nonlinear Control., vol. 20, no. 1, pp. 106–118, Apr. 2010. doi: 10.1002/rnc.1425
|
| [17] |
W. H. Chen, J. Yang, L. Guo, and S. H. Li, “Disturbance observer-based control and related methods: An overview,” IEEE Trans. Ind. Electron., vol. 63, no. 2, pp. 1083–1095, Feb. 2016. doi: 10.1109/TIE.2015.2478397
|
| [18] |
X. Huo, Q. L. Hu, and B. Xiao, “Finite-time fault tolerant attitude stabilization control for rigid spacecraft,” ISA Trans., vol. 53, pp. 241–250, Mar. 2014. doi: 10.1016/j.isatra.2013.11.017
|
| [19] |
R. R. Nair and L. Behera, “Robust adaptive gain higher order sliding mode observer based control-constrained nonlinear model predictive control for spacecraft formation flying,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 367–381, Jan. 2018. doi: 10.1109/JAS.2016.7510253
|
| [20] |
X. Wang, J. Guo, S. J. Tang, and S. Qi, “Fixed-time disturbance observer based fixed-time back-stepping control for an air-breathing hypersonic vehicle,” ISA Trans., vol. 88, pp. 233–245, May 2019. doi: 10.1016/j.isatra.2018.12.013
|
| [21] |
K. Kim, K. Rew, and S. Kim, “Disturbance observer for estimating higher order disturbances in time series expansion,” IEEE Trans. Autom. Control, vol. 55, no. 8, pp. 1905–1911, Aug. 2010. doi: 10.1109/TAC.2010.2049522
|
| [22] |
R. D. Yan and Z. Wu, “Attitude stabilization of flexible spacecrafts via extended disturbance observer based controller,” Acta Astronaut., vol. 133, pp. 73–80, Apr. 2017. doi: 10.1016/j.actaastro.2017.01.004
|
| [23] |
W. Chen and M. Saif, “An iterative learning observer for fault detection and accommodation in nonlinear time-delay systems,” Int. J. Robust Nonlinear Control., vol. 16, no. 1, pp. 1–19, Jan. 2006. doi: 10.1002/rnc.1033
|
| [24] |
W. Chen and F. Chowdhury, “Simultaneous identification of time-varying parameters and estimation of system states using iterative learning observers,” Int. J. Syst. Sci., vol. 38, no. 1, pp. 39–45, Jan. 2007. doi: 10.1080/00207720601042934
|
| [25] |
H. F. Tao, D. P. Chen, and H. Z. Yang, “Iterative learning fault diagnosis algorithm for non-uniform sampling hybrid system,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 3, pp. 534–542, Jul. 2017. doi: 10.1109/JAS.2016.7510052
|
| [26] |
T. Chen, M. N. Li, and J. J. Shan, “Iterative learning control of a flexible manipulator considering uncertain parameters and unknown repetitive disturbance, ” in Proc. Amer. Control Conf., Philadelphia, PA, USA, July. 2019, pp. 2209–2214.
|
| [27] |
B. L. Wu, D. W. Wang, and E. K. Poh, “High precision satellite attitude tracking control via iterative learning control,” J. Guid. Control Dyn., vol. 38, no. 3, pp. 528–534, Mar. 2015. doi: 10.2514/1.G000497
|
| [28] |
T. F. He and Z. Wu, “Multirate iterative learning disturbance observer with robustness to frequency deviation for high precision attitude stabilization of flexible spacecraft subject to complex disturbances,” Aerosp. Sci. Technol., vol. 96, Article No. 105583, Jan. 2020. doi: 10.1016/j.ast.2019.105583
|
| [29] |
W. Chen and M. Saif, “Observer-based fault diagnosis of satellite systems subject to time-varying thruster faults,” J. Dyn. Syst. Meas. Control-Trans. ASME, vol. 129, no. 3, pp. 352–356, May 2007. doi: 10.1115/1.2719773
|
| [30] |
Z. Z. Zhang, D. Ye, B. Xiao, and Z. B. Sun, “Third-order sliding mode fault-tolerant control for satellites based on iterative learning observer,” Asian J. Control, vol. 21, no. 1, pp. 43–51, Jan. 2019. doi: 10.1002/asjc.2010
|
| [31] |
Q. L. Hu, G. L. Niu, and C. L. Wang, “Spacecraft attitude fault-tolerant control based on iterative learning observer and control allocation,” Aerosp. Sci. Technol., vol. 75, pp. 245–253, Apr. 2018. doi: 10.1016/j.ast.2017.12.031
|
| [32] |
J. T. Shi, X. He, and D. H. Zhou, “Iterative learning based estimation of periodically occurring faults,” IET Control Theory Appl., vol. 10, no. 2, pp. 244–251, 2016. doi: 10.1049/iet-cta.2015.0791
|
| [33] |
P. Hughes, Spacecraft Attitude Dynamics. Mineola, New York, USA: Courier Corporation, 2004.
|
| [34] |
A. H. J. Ruiter, C. J. Damaren, and J. R. Forbes, Spacecraft Dynamics and Control: An Introduction. West Sussex, UK: John Wiley & Sons, ISBN 9781118342367, 2013.
|
| [35] |
Q. L. Hu, B. Xiao, D. Wang, and E. Poh, “Attitude control of spacecraft with actuator uncertainty,” J. Guid. Control Dyn., vol. 36, no. 6, pp. 1771–1776, Nov. 2013. doi: 10.2514/1.58624
|
| [36] |
C. C. Liu, X. J. Jing, S. Daley, S. Daley, and F. M. Li, “Recent advances in micro-vibration isolation,” Mech. Syst. Signal Proc., vol. 56–57, pp. 55–80, Dec. 2015. doi: 10.1016/j.ymssp.2014.10.007
|
| [37] |
M. Toyoshima, Y. Takayama, H. Kunimori, T. Jono, and S. Yamakawa, “In-orbit measurements of spacecraft microvibrations for satellite laser communication links,” Opt. Eng., vol. 49, no. 8, Article No. 083604, Aug. 2010. doi: 10.1117/1.3482165
|
| [38] |
L. Cao, X. Q. Chen, and A. K. Misra, “Central difference predictive filter for attitude determination with low precision sensors and model errors,” Adv. Space Res., vol. 54, no. 11, pp. 2336–2348, Dec. 2014. doi: 10.1016/j.asr.2014.08.017
|
| [39] |
Z. Q. Gao, “Scaling and bandwidth-parameterization based controller tuning, ” in Proc. Amer. Control Conf., Denver, CO, USA, 2003, pp. 4989–4996.
|
| [40] |
L. Guo and W. H. Chen, “Disturbance attenuation and rejection for systems with nonlinearity via DOBC approach,” Int. J. Robust Nonlinear Control, vol. 15, no. 3, pp. 109–125, Feb. 2005. doi: 10.1002/rnc.978
|
| [41] |
D. Bristow, M. Tharayil, and A. Alleynea, “A survey of iterative learning control: A learning-based method for high-performance tracking control,” IEEE Control Syst. Mag., vol. 26, pp. 96–114, Jun. 2006. doi: 10.1109/MCS.2006.1636313
|
| [42] |
Q. X. Jia, W. Chen, Y. C. Zhang, and H. Y. Li, “Fault reconstruction and fault-tolerant control via learning observers in Takagi-Sugeno fuzzy descriptor systems with time delays,” IEEE Trans. Ind. Electron., vol. 62, no. 6, pp. 3885–3895, Jun. 2015.
|
| [43] |
A. Godbole, J. Kolhe, and S. Talole, “Performance analysis of generalized extended state observer in tackling sinusoidal disturbances,” IEEE Trans. Control Syst. Technol., vol. 21, no. 6, pp. 2212–2223, Nov. 2013. doi: 10.1109/TCST.2012.2231512
|
Figures(8) / Tables(2)






 DownLoad:
DownLoad: