A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 8
Issue 8
Volume 8
Issue 8
IEEE/CAA Journal of Automatica Sinica
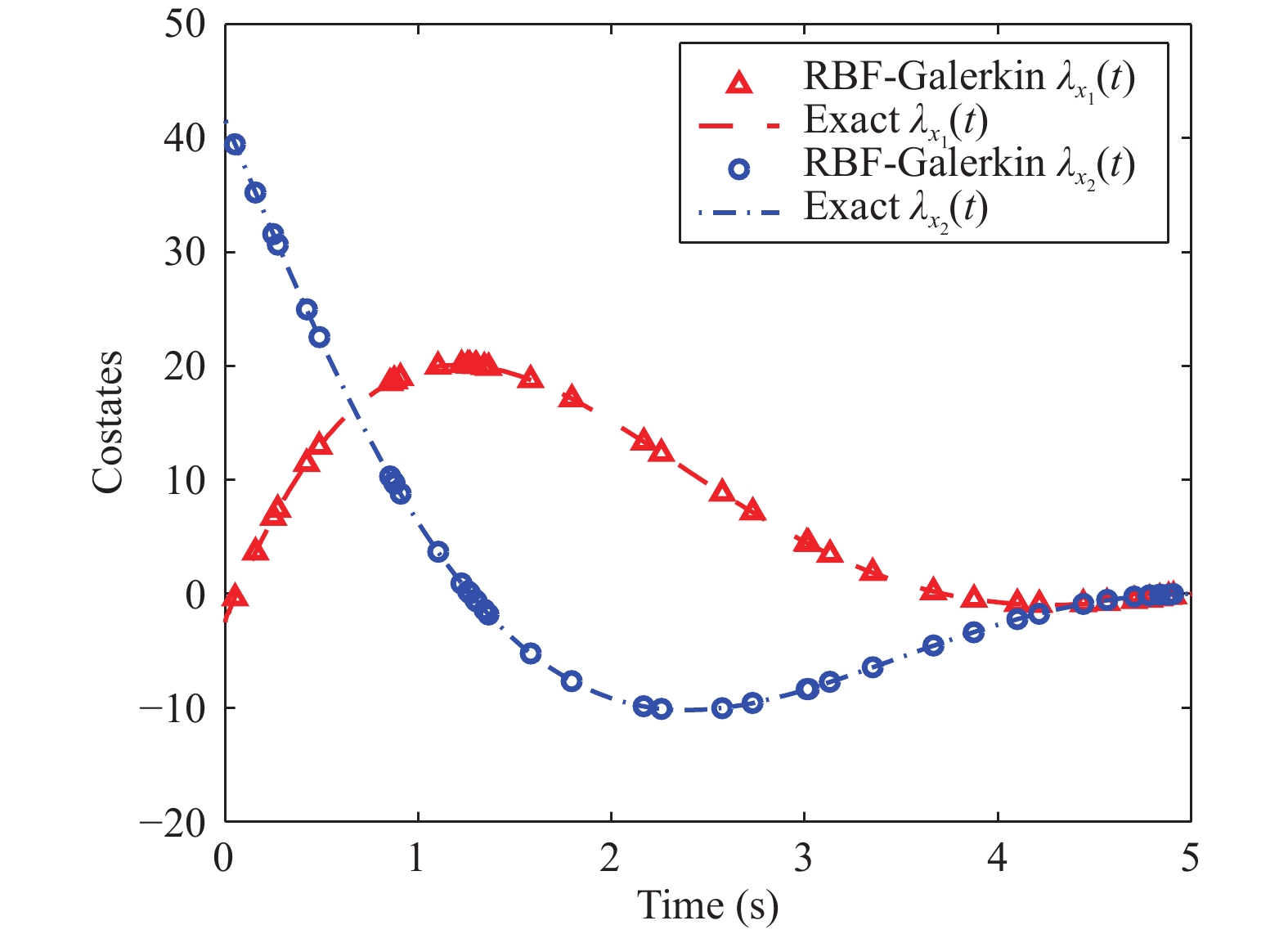
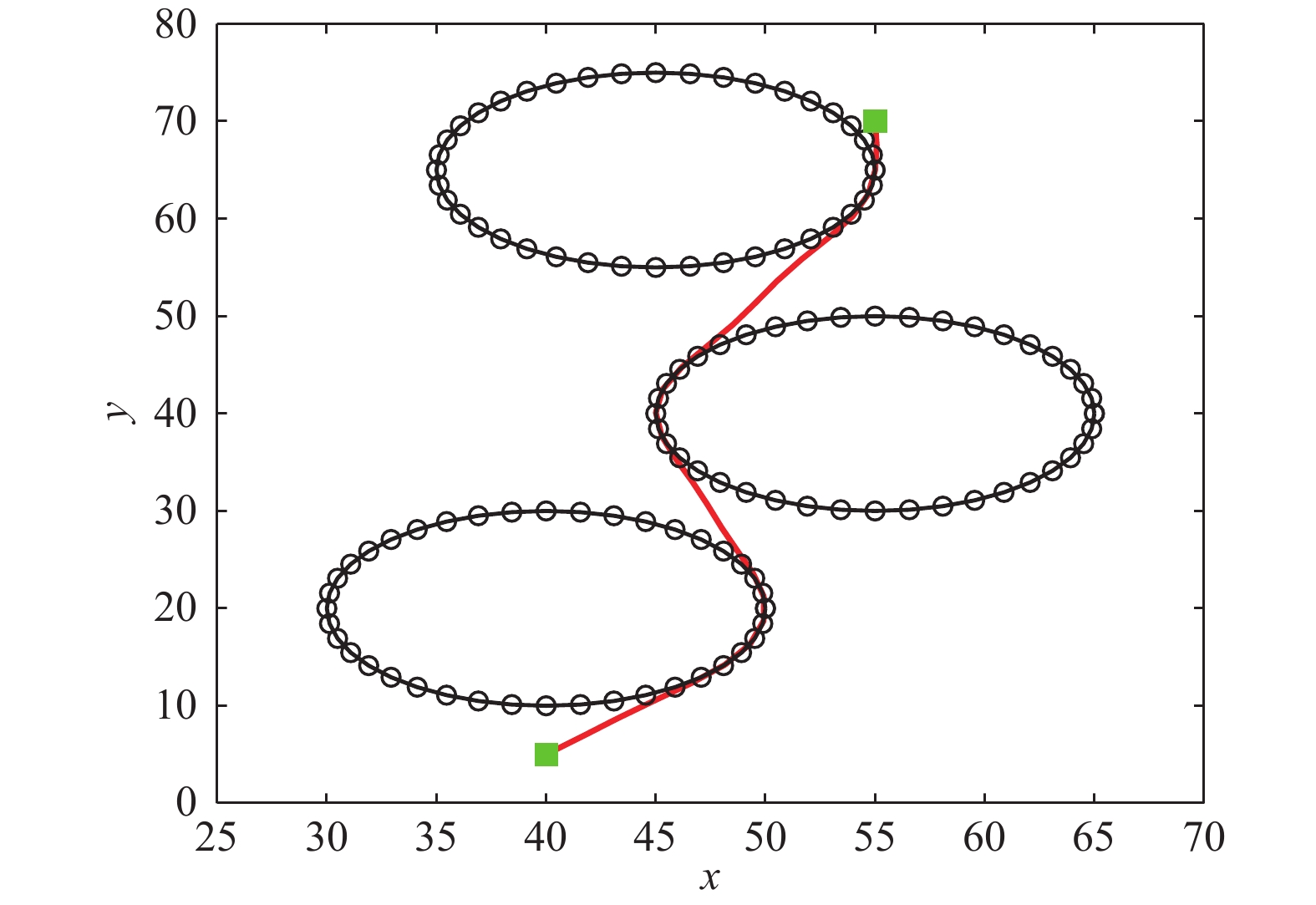
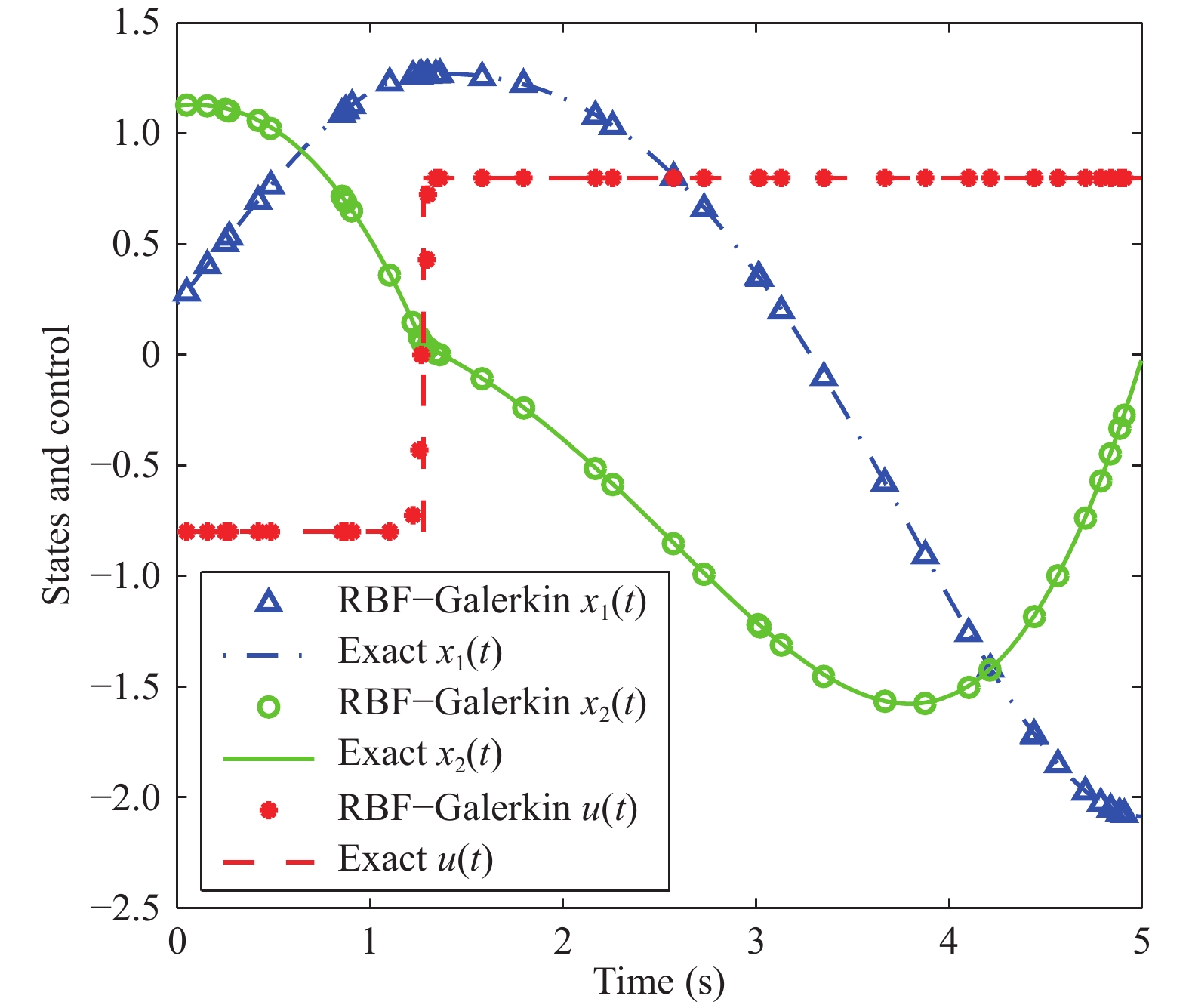
| Citation: | H. Mirinejad, T. Inanc, and Jacek M. Zurada, "Radial Basis Function Interpolation and Galerkin Projection for Direct Trajectory Optimization and Costate Estimation," IEEE/CAA J. Autom. Sinica, vol. 8, no. 8, pp. 1380-1388, Aug. 2021. doi: 10.1109/JAS.2021.1004081

|

| [1] |
X. Wang J. Liu, and H. Peng, “Computational techniques for nonlinear optimal control,” in Symplectic Pseudospectral Methods for Optimal Control. Intelligent Systems, Control and Automation: Science and Engineering, vol. 97, Springer, Singapore, 2021.
|
| [2] |
B. A. Conway, “A survey of methods available for the numerical optimization of continuous dynamic systems,” J. Optim. Theory Appl., vol. 152, no. 2, pp. 271–306, Feb. 2012.
|
| [3] |
A. V. Rao, “Trajectory Optimization: A Survey,” in: Optimization and Optimal Control in Automotive Systems, Lecture Notes in Control and Information Sciences vol. 455, Springer, Cham, pp. 3–21, 2014.
|
| [4] |
W. W. Hager, “Runge-Kutta methods in optimal control and the transformed adjoint system,” Numer. Math., vol. 87, pp. 247–282, 2000. doi: 10.1007/s002110000178
|
| [5] |
C. Jiang, K. Xie, C. Yu, et al., “A sequential computational approach to optimal control problems for differential-algebraic systems based on efficient implicit Runge–Kutta integration,” Appl. Math. Modelling, vol. 58 pp. 313–330, Jun. 2018.
|
| [6] |
J. Mei, F. Zhang, J. Zang, Y. Zhao, and H. Yan, “Trajectory optimization of the 6-degrees-of-freedom high-speed parallel robot based on B-spline curve,” Scientific Progress, vol. 103, no. 1, pp. 1–26, 2020.
|
| [7] |
Y. E. Tabriz and A. Heydari, “Generalized B-spline functions method for solving optimal control problems,” Comput. Methods Differential Equations, vol. 2, no. 4, pp. 243–255, 2014.
|
| [8] |
X. Tang and J. Chen, “Direct trajectory optimization and costate estimation of infinite-horizon optimal control problems using collocation at the flipped legendre-gauss-radau points,” IEEE/CAA J. Autom. Sinica, vol. 3, pp. 174–183, 2016. doi: 10.1109/JAS.2016.7451105
|
| [9] |
I. M. Ross and M. Karpenko, “A review of pseudospectral optimal control: From theory to flight,” Annual Reviews in Control, vol. 36, no. 2, pp. 182–197, 2012. doi: 10.1016/j.arcontrol.2012.09.002
|
| [10] |
H. Ma, T. Qin, and W. Zhang, “An efficient Chebyshev algorithm for the solution of optimal control problems,” IEEE Trans. Autom. Control, vol. 56, no. 3, pp. 675–680, 2011. doi: 10.1109/TAC.2010.2096570
|
| [11] |
D. A. Benson, G. T. Huntington, T. P. Thorvaldsen, and A. V. Rao, “Direct trajectory optimization and costate estimation via an orthogonal collocation method,” J. Guidance Control Dynamics, vol. 29, no. 6, pp. 1435–1440, 2006. doi: 10.2514/1.20478
|
| [12] |
G. Elnagar, M.A. Kazemi, and M. Razzaghi, “The pseudospectral Legendre method for discretizing optimal control problems,” IEEE Trans. Autom. Control, vol. 40, no. 10, pp. 1793–1796, 1995. doi: 10.1109/9.467672
|
| [13] |
Q. Gong, I. M. Ross, and F. Fahroo, “Spectral and pseudospectral optimal control over arbitrary grids,” J. Optim. Theory Appl., vol. 169, no. 3, pp. 759–783, 2016. doi: 10.1007/s10957-016-0909-y
|
| [14] |
M. A. Mehrpouya and H. Peng, “A robust pseudospectral method for numerical solution of nonlinear optimal control problems,” Intern. J. Comput. Math., 2020. DOI: 10.1080/00207160.2020.1807521.
|
| [15] |
M. Shamsi, “A modified pseudospectral scheme for accurate solution of bang-bang optimal control problems,” Optim. Control Appl. Meth., vol. 32, pp. 668–680, 2011. doi: 10.1002/oca.967
|
| [16] |
E. Tohidi and S. L. Noghabi, “An efficient Legendre pseudospectral method for solving nonlinear quasi bang-bang optimal control problems,” J. Applied Math. Statistics Inform., vol. 8, no. 2, pp. 73–85, 2012. doi: 10.2478/v10294-012-0016-0
|
| [17] |
J. Wei, X Tang, and J. Yan, “Costate estimation for a multiple-interval pseudospectral method using collocation at the flipped Legendre-Gauss-Radau Points,” IEEE/CAA J. Autom. Sinica, pp. 1–15, Nov. 2016. DOI: 10.1109/JAS.2016.7510028.
|
| [18] |
H. Ghassemi, M. Maleki, and M. Allame, “On the modification and convergence of unconstrained optimal control using pseudospectral methods,” Optimal Control Applications &Methods, vol. 42, no. 3, pp. 717–743, 2021.
|
| [19] |
H. Mirinejad, “A radial basis function method for solving optimal control problems,” Ph.D. dissertation, University of Louisville, May 2016.
|
| [20] |
J. A. Rad, S. Kazem, and K. Parand, “Optimal control of a parabolic distributed parameter system via radial basis functions,” Commun. Nonlinear Sci. Numer. Simul., vol. 19, no. 8, pp. 2559–2567, 2014. doi: 10.1016/j.cnsns.2013.01.007
|
| [21] |
H. Mirinejad and T. Inanc, “A radial basis function method for direct trajectory optimization,” in Proc. American Control Conf., Chicago, IL. 2015, pp. 4923–4928.
|
| [22] |
H. Mirinejad and T. Inanc, “An RBF collocation method for solving optimal control problems,” Robotics Autonomous Syst., vol. 87, pp. 219–225, 2017. doi: 10.1016/j.robot.2016.10.015
|
| [23] |
H. Mirinejad and T. Inanc, “RBF method for optimal control of drug administration in the anemia of hemodialysis patients,” in Proc. 41st Annu. Northeast Biomed. Eng. Conf., Troy, NY, 2015.
|
| [24] |
H. Mirinejad and T. Inanc, “Individualized anemia management using a radial basis function method,” in Proc. IEEE Great Lakes Biomed. Conf., Milwaukee, WI, 2015.
|
| [25] |
H. Mirinejad, T. Inanc, M. Brier, and A. Gaweda, “RBF-based receding horizon control approach to personalized anemia treatment,” in Proc. 41st Annu. Northeast Biomed. Eng. Conf., Troy, NY, 2015.
|
| [26] |
S. Hubbert, Q. Thong, L. Gia, and T. M. Morton, Spherical Radial Basis Functions, Theory and Applications. 1st ed., Springer International Publishing, 2015.
|
| [27] |
K. E. Atkinson and W. Han, Theoretical Numerical Analysis: A Functional Analysis Framework. 3rd ed., Springer-Verlag, New York, 2009.
|
| [28] |
I. M. Ross, “A historical introduction to the covector mapping principle,” in Proc. AAS/AIAA Astrodynamics Specialist Conf., Lake Tahoe, CA, 2005.
|
| [29] |
Q. Gong, I. M. Ross, W. Kang, and F. Fahroo, “Connections between the covector mapping theorem and convergence of pseudospectral methods for optimal control,” Computat. Optim. and Appl., vol. 41, pp. 307–335, 2008. doi: 10.1007/s10589-007-9102-4
|
| [30] |
M. Ross and F. Fahroo, User’s manual For DIDO 2002: A MATLAB application package for dynamic optimization, Dept. Aeronautics and Astronautics, Naval Postgraduate School, AA-02-002, Monterey, CA, 2002.
|
| [31] |
R. Bhattacharya, “OPTRAGEN, a MATLAB toolbox for optimal trajectory generation,” in Proc. 45th IEEE Conf. Decision and Control, San Diego, CA, Dec. 2006.
|
| [32] |
P. E. Gill, W. Murray, and M. A. Saunders, “SNOPT: An SQP algorithm for large-scale constrained optimization,” SIAM Review, vol. 47, no. 1, pp. 99–131, 2005. doi: 10.1137/S0036144504446096
|
Figures(3) / Tables(1)







 DownLoad:
DownLoad: